
엔비디아(www.nvidia.co.kr CEO 젠슨 황)는 최신 버전의 엔비디아 피직스(PhysX) 5 SDK가 엔비디아 피직스 4와 동일한 오픈 소스 라이센스 조건으로 제공된다고 밝혔다. 이는 전 세계 산업 전반에 걸쳐 시뮬레이션 워크플로 및 애플리케이션을 확장하는 데 도움이 된다. 엔비디아 옴니버스(Omniverse)/피직스 깃허브(GitHub) 저장소에서 해당 업데이트를 진행할 수 있다.
피직스는 게임웍스(GameWorks)의 오랜 기술로 엔비디아 옴니버스의 주요 물리 엔진이자 기술면에서 핵심적인 기둥 역할을 하고 있다. 업계 리더들은 로보틱스, 심층 강화 학습, 자율 주행, 공장 자동화 및 시각 효과를 위해 강력한 시뮬레이션 엔진인 피직스를 사용하고 있다. 차세대 로보틱스 애플리케이션의 경우 피직스를 통해 자율 기계를 시뮬레이션하고 테스트하는 데 필요한 실시간 속도에서 높은 정확도의 시뮬레이션을 할 수 있다.
피직스는 깃허브의 픽사애니메이션스튜디오(PixarAnimationStudios)/USD에서 사용할 수 있는 유사한 오픈 소스 픽사 USD(Universal Scene Description) 물리 표준의 주요 레퍼런스 구현체이다. 이는 피직스 4에 적용되는 것처럼 보다 관대한 라이센스 조건으로 회귀하는 결정임을 의미한다. 모든 CPU 소스 코드는 간단한 BSD3 오픈 소스 라이선스로 이용할 수 있으며, 엔비디아 GPU 바이너리가 무료로 포함된다.
새롭게 달라진 피직스 5 오픈 소스
엔비디아 플로우(Flow)와 엔비디아 블라스트(Blast) 라이브러리는 기술적으로는 피직스와 별개이지만, 이제 피직스 제품군의 일부로써 함께 라이선스가 부여된다. 플로우는 피직스 SDK와 동일한 깃허브 레포(repo)에서 함께 번들로 제공되고 있으며 블라스트 역시 곧 추가될 예정이다.
피직스 5 SDK는 다양한 새로운 기능을 제공하는 엔비디아 플렉스를 지원한다. 피직스 5 SDK가 지원하는 기능에는 유한 요소 모델 기반 소프트 바디 다이나믹스(Dynamics)는 물론 GPU에서 실행되도록 최적화된 위치 기반 역학을 사용하는 액체, 천, 팽창 가능한 객체 등이 포함된다. GPU에서 서명된 거리 필드 충돌 기능 또한 추가됐다. 이로써 사용자는 소스 메시의 복셀화 버전을 사용해 충돌 감지를 수행할 수 있으며 콘벡스(convex) 분해를 생성할 필요가 없다.
새로운 CPU 기능 측면에서, 피직스 5 사용자는 사용자 지정 지오메트리를 정의할 수 있다. 이를 통해 실린더 형태 또는 암시적인 블록 기반의 세계를 지원할 수 있다. 또한 대규모 시뮬레이션을 위한 CPU 및 GPU 병렬 컴퓨팅 성능도 크게 향상됐다.
피직스의 발전은 몇 가지의 근본적인 기술적 변화를 가져왔다. 과거 다양한 비디오 게임 콘솔에 사용할 수 있는 최적화된 포트를 갖춘 게임 물리 엔진이었던 피직스는 이제 로보틱스, 심층 강화 학습, 자율 주행, 공장 자동화 및 시각 효과에 사용되는 고성능 GPU 가속 물리 시뮬레이션 엔진이 됐다. 그 결과 엔비디아에서 더 이상 비디오 게임 콘솔 포트 사용할 수 없지만 허가 라이선스를 통해 커뮤니티는 이러한 플랫폼에 대한 포트를 만들고 유지할 수 있다.
앞으로 고급 데모는 SDK와 함께 번들로 제공되지 않는다. 엔비디아 온디맨드(On-Demand)의 엔비디아 옴니버스 물리 데모 페이지를 방문하면 피직스에서 사용 가능한 기능에 대한 고급 예시들을 확인할 수 있다. 엔비디아 옴니버스에서는 콘텐츠 제작 도구에 대한 정보 역시 함께 제공하고 있다. 엔비디아는 옴니버스에서 최고의 물리 도구 모음을 만드는 데 투자하고 있으며, 이는 발전과 개선을 거듭할 예정이다.
저작권©올포칩 미디어. 무단전재 및 재배포를 금지합니다.
 델 테크놀로지스, 신규 솔루션 및 서비스와 4세대 AMD 탑재한 신모델 대거 공개델은 AI 및 HPC 이니셔티브를 통해 더 빠르고 스마트하게 성과를 내고자 하는 고객들을 위해 HPC 포트폴리오를 강화했다. 인텔(Intel), 엔비디아(NVIDIA)와의 협력해 설계된 신규 제품군에는 스마트 쿨링 기술이 적용되었으며, AI 모델 학습, HPC 모델링 및 시뮬레이션, 코어-투-엣지 추론 및 데이터 시각화 등을 지원한다.
델 테크놀로지스, 신규 솔루션 및 서비스와 4세대 AMD 탑재한 신모델 대거 공개델은 AI 및 HPC 이니셔티브를 통해 더 빠르고 스마트하게 성과를 내고자 하는 고객들을 위해 HPC 포트폴리오를 강화했다. 인텔(Intel), 엔비디아(NVIDIA)와의 협력해 설계된 신규 제품군에는 스마트 쿨링 기술이 적용되었으며, AI 모델 학습, HPC 모델링 및 시뮬레이션, 코어-투-엣지 추론 및 데이터 시각화 등을 지원한다. IAR 시스템즈의 RISC-V용 임베디드 워크벤치, 안데스의 CoDense 확장 버전 지원CoDense는 AndeStar V5 RISC-V 프로세서 ISA의 특허 받은 확장 버전으로, IAR의 툴체인이 콤팩트한 코드를 생성하도록 지원함으로써 타깃 프로세서의 플래시 메모리 공간을 절약할 수 있게 해준다. 또한 기존에 지원되었던 AndeStar V5 DSP/SIMD 및 퍼포먼스 확장 버전은 보다 우수한 애플리케이션 성능을 제공하도록 돕는다.
IAR 시스템즈의 RISC-V용 임베디드 워크벤치, 안데스의 CoDense 확장 버전 지원CoDense는 AndeStar V5 RISC-V 프로세서 ISA의 특허 받은 확장 버전으로, IAR의 툴체인이 콤팩트한 코드를 생성하도록 지원함으로써 타깃 프로세서의 플래시 메모리 공간을 절약할 수 있게 해준다. 또한 기존에 지원되었던 AndeStar V5 DSP/SIMD 및 퍼포먼스 확장 버전은 보다 우수한 애플리케이션 성능을 제공하도록 돕는다. 아스펜테크, 지속가능성을 위한 새로운 aspenONE 소프트웨어 출시새로운 aspenONE V14는 첨단 인텔리전스와 가이던스 기능을 제공해 의사결정역량을 개선하고 오퍼레이셔널 엑설런스(Operational Excellence)를 한층 향상시켜 준다. 또한, 100개 이상의 샘플 모델을 적용해 지속가능성 프로젝트를 가속화하고, 스코프 1 및 2 배출량을 관리함으로써 탄소 발자국을 줄일 수 있게 한다.
아스펜테크, 지속가능성을 위한 새로운 aspenONE 소프트웨어 출시새로운 aspenONE V14는 첨단 인텔리전스와 가이던스 기능을 제공해 의사결정역량을 개선하고 오퍼레이셔널 엑설런스(Operational Excellence)를 한층 향상시켜 준다. 또한, 100개 이상의 샘플 모델을 적용해 지속가능성 프로젝트를 가속화하고, 스코프 1 및 2 배출량을 관리함으로써 탄소 발자국을 줄일 수 있게 한다. 로데슈바르즈, R&S CMX500 원박스 테스터와 최신 5G NR 프로토콜 적합성 테스트 사례를 통해 업계 리더십 입증모바일 기기의 적합성 인증 작업은 시장 출시를 위한 주요 단계 중 하나이다. 다양한 모바일 네트워크에서 셀룰러 기기의 동작을 보장하기 위해서는 GCF, PTCRB 또는 CTIA와 같은 인증 기관이 승인한 테스트 연구소에서 인증을 받아야 한다. 모든 3GPP 기반 테스트 기준을 충족시키는 것은, 특히 5G NR의 경우, 많은 수의 지원되는 대역 조합과 구축 옵션 및 진화하는 표준으로 인해 테스트 사례가 크게 증가하면서 사전에 제대로 준비하지 않으면, 장치 제조업체들에게 상당히 어렵고 비용이 많이 소모되는 과정이 될 수 있다.
로데슈바르즈, R&S CMX500 원박스 테스터와 최신 5G NR 프로토콜 적합성 테스트 사례를 통해 업계 리더십 입증모바일 기기의 적합성 인증 작업은 시장 출시를 위한 주요 단계 중 하나이다. 다양한 모바일 네트워크에서 셀룰러 기기의 동작을 보장하기 위해서는 GCF, PTCRB 또는 CTIA와 같은 인증 기관이 승인한 테스트 연구소에서 인증을 받아야 한다. 모든 3GPP 기반 테스트 기준을 충족시키는 것은, 특히 5G NR의 경우, 많은 수의 지원되는 대역 조합과 구축 옵션 및 진화하는 표준으로 인해 테스트 사례가 크게 증가하면서 사전에 제대로 준비하지 않으면, 장치 제조업체들에게 상당히 어렵고 비용이 많이 소모되는 과정이 될 수 있다. NXP, 새로운 아날로그 프론트엔드로 소프트웨어 정의 스마트 공장 구현N-AFE 제품군은 소프트웨어 구성 가능한 범용 아날로그 입력 장치로 설계됐다. 이는 소프트웨어 정의(software-defined) 공장을 지원해, 이용자는 보다 쉽게 변화하는 시장 요구에 따라 스마트 공장을 구성하고 설정을 조정할 수 있다. 시간이 흐를수록 공장들이 보다 ‘스마트’해짐에도 불구하고, 빠르게 변화하는 시장 트렌드에 적응하는 것은 여전히 어려운 과제다.
NXP, 새로운 아날로그 프론트엔드로 소프트웨어 정의 스마트 공장 구현N-AFE 제품군은 소프트웨어 구성 가능한 범용 아날로그 입력 장치로 설계됐다. 이는 소프트웨어 정의(software-defined) 공장을 지원해, 이용자는 보다 쉽게 변화하는 시장 요구에 따라 스마트 공장을 구성하고 설정을 조정할 수 있다. 시간이 흐를수록 공장들이 보다 ‘스마트’해짐에도 불구하고, 빠르게 변화하는 시장 트렌드에 적응하는 것은 여전히 어려운 과제다. PTC, 현장 서비스 관리 SaaS 전문 기업 서비스맥스 인수서비스맥스는 클라우드 네이티브의 제품 중심 현장 서비스 관리(FSM) 소프트웨어 분야에서 인정받는 선도 기업이다. PTC는 이번 인수로 제품 정보의 디지털 스레드를 다운스트림 엔터프라이즈 자산관리(EAM) 및 FSM 기능으로 확장함으로써 폐쇄 루프(closed-loop) 제품 수명주기 관리(PLM) 오퍼링을 강화할 계획이다.
PTC, 현장 서비스 관리 SaaS 전문 기업 서비스맥스 인수서비스맥스는 클라우드 네이티브의 제품 중심 현장 서비스 관리(FSM) 소프트웨어 분야에서 인정받는 선도 기업이다. PTC는 이번 인수로 제품 정보의 디지털 스레드를 다운스트림 엔터프라이즈 자산관리(EAM) 및 FSM 기능으로 확장함으로써 폐쇄 루프(closed-loop) 제품 수명주기 관리(PLM) 오퍼링을 강화할 계획이다. TUV SUD, 업계 최초로 폐기물 제로 ‘DIN SPEC 91436’ 인증서 발행TUV SUD는 체코에 위치한 독일 할인 유통업체 ‘리들(Lidl)’에 폐기물 및 재활용품 관리를 위한 새로운 참조 규격인 ‘DIN SPEC 91436’에 따라 인증서를 최초로 발행했다고 밝혔다. 이후 티유브이슈드는 네덜란드와 슬로바키아, 루마니아에 위치한 리들(Lidl) 및 카우프랜드(Kaufland) 매장에 대한 인증도 연달아 진행한다고 밝혔다.
TUV SUD, 업계 최초로 폐기물 제로 ‘DIN SPEC 91436’ 인증서 발행TUV SUD는 체코에 위치한 독일 할인 유통업체 ‘리들(Lidl)’에 폐기물 및 재활용품 관리를 위한 새로운 참조 규격인 ‘DIN SPEC 91436’에 따라 인증서를 최초로 발행했다고 밝혔다. 이후 티유브이슈드는 네덜란드와 슬로바키아, 루마니아에 위치한 리들(Lidl) 및 카우프랜드(Kaufland) 매장에 대한 인증도 연달아 진행한다고 밝혔다. 버티브, 2023 데이터센터 업계의 화두로 에너지 소비와 효율 강조데이터센터 업계는 미래의 성공과 생존을 위해 에너지 및 용수 소비 효율을 공격적으로 끌어올릴 필요가 있다. 규제 강화가 불가피해졌으며, 이는 데이터센터 분야에서 중요한 혁신들을 이끌어낼 것이다. 여정이 평탄하지만은 않겠지만, 변화를 예측하고 데이터센터 애플리케이션의 갈수록 높아지는 요구를 충족하는 전문적인 데이터센터 파트너와 혁신적인 솔루션을 사용한다면 이 여정을 잘 헤쳐나갈 수 있을 것이다.
버티브, 2023 데이터센터 업계의 화두로 에너지 소비와 효율 강조데이터센터 업계는 미래의 성공과 생존을 위해 에너지 및 용수 소비 효율을 공격적으로 끌어올릴 필요가 있다. 규제 강화가 불가피해졌으며, 이는 데이터센터 분야에서 중요한 혁신들을 이끌어낼 것이다. 여정이 평탄하지만은 않겠지만, 변화를 예측하고 데이터센터 애플리케이션의 갈수록 높아지는 요구를 충족하는 전문적인 데이터센터 파트너와 혁신적인 솔루션을 사용한다면 이 여정을 잘 헤쳐나갈 수 있을 것이다. PcVue 솔루션을 이용한 전기자동차 충전소 최적화 및 제어PcVue 애플리케이션에는 충전 시간 동안 스테이션에서 제공하는 전력과 충전 종료 이벤트, 알람 및 충전 시작/중지 등과 같은 여러 정보들이 보고된다. 또한 10개의 WebVue 클라이언트는 스테이션의 가용성을 높이기 위해 보고서에 대한 시각화를 제공한다. 샤또(Château) 본사에 있는 BMS 관리 시스템과도 결합되어 있다.
PcVue 솔루션을 이용한 전기자동차 충전소 최적화 및 제어PcVue 애플리케이션에는 충전 시간 동안 스테이션에서 제공하는 전력과 충전 종료 이벤트, 알람 및 충전 시작/중지 등과 같은 여러 정보들이 보고된다. 또한 10개의 WebVue 클라이언트는 스테이션의 가용성을 높이기 위해 보고서에 대한 시각화를 제공한다. 샤또(Château) 본사에 있는 BMS 관리 시스템과도 결합되어 있다.- 어플라이드 머티어리얼즈, 2022년 매출 전년대비 12% 증가어플라이드 머티어리얼즈가 10월 30일 마감한 회계연도 2022년 4분기 및 전체 실적을 발표했다. 회계연도 2022년 4분기 67억5000만 달러의 수익을 창출했다. 미국회계기준(GAAP)으로 매출총이익률 45.9%, 영업이익과 영업이익률은 각각 19억9000만 달러와 29.5%였으며, 주당순이익(EPS)은 1.85달러를 기록했다.
 클래로티 코리아 파트너 데이 2022 개최클래로티 코리아 파트너 데이에는 닉 닌드라 부사장의 아태지역 채널 오버뷰를 시작으로 정완채 수석 엔지니어의 클래로티 산업 보안 통합플랫폼 소개, 정재원 수석 엔지니어의 클래로티 서포트 프로그램 소개, 정찬영 클래로티 코리아 채널 이사의 파트너 프로그램 및 전략 소개 등 국내 파트너들을 위한 주요 발표가 진행됐다.
클래로티 코리아 파트너 데이 2022 개최클래로티 코리아 파트너 데이에는 닉 닌드라 부사장의 아태지역 채널 오버뷰를 시작으로 정완채 수석 엔지니어의 클래로티 산업 보안 통합플랫폼 소개, 정재원 수석 엔지니어의 클래로티 서포트 프로그램 소개, 정찬영 클래로티 코리아 채널 이사의 파트너 프로그램 및 전략 소개 등 국내 파트너들을 위한 주요 발표가 진행됐다. 엔비디아, 록히드 마틴과 미국 기후 데이터 가속화 지원NOAA는 엔비디아와 록히드 마틴을 선정해 기후 연구를 포함한 환경 모니터링과 예측을 가속화하기 위한 프로토타입 지구의 디지털 트윈을 구축했다. 해당 시스템은 AI기술을 이용해 복잡한 기상 시각화 출력을 생성하는 데 필요한 시간을 몇 배나 줄일 수 있는 잠재력을 갖고 있다.
엔비디아, 록히드 마틴과 미국 기후 데이터 가속화 지원NOAA는 엔비디아와 록히드 마틴을 선정해 기후 연구를 포함한 환경 모니터링과 예측을 가속화하기 위한 프로토타입 지구의 디지털 트윈을 구축했다. 해당 시스템은 AI기술을 이용해 복잡한 기상 시각화 출력을 생성하는 데 필요한 시간을 몇 배나 줄일 수 있는 잠재력을 갖고 있다.- Arm, 새로운 파트너십 통해 IoT 소프트웨어 개발 가속화Arm Virtual Hardware는 반도체 실물이 없는 상태에서도 복잡한 보드 팜(board farms)을 구축 또는 유지할 필요성을 제거하여 소프트웨어와 하드웨어의 공동 설계를 가능케 한다. 이를 통해 임베디드 시스템 개발자들은 MLOps 및 DevOps 워크플로우와 같은 보다 현대적인 개발 방식에 대규모로 액세스할 수 있다.
 첨단 세라믹 제조업체 쿠어스텍코리아, 공개 채용 모집쿠어스텍코리아는 급증하는 반도체 수요에 맞춰, 구미 외국인 투자지역의 1만6000여㎡ 부지에서 함께 일할 인력의 신규 채용에 적극적으로 나서고 있다. 첨단 세라믹 수요가 폭증하여 2020년 구미 2공장을 증설하며 반도체 장비부품 생산 확대에 따른 충원이다.
첨단 세라믹 제조업체 쿠어스텍코리아, 공개 채용 모집쿠어스텍코리아는 급증하는 반도체 수요에 맞춰, 구미 외국인 투자지역의 1만6000여㎡ 부지에서 함께 일할 인력의 신규 채용에 적극적으로 나서고 있다. 첨단 세라믹 수요가 폭증하여 2020년 구미 2공장을 증설하며 반도체 장비부품 생산 확대에 따른 충원이다.
 마이크로칩, 보안 기능을 확장한 maXTouch 터치스크린 컨트롤러 제품군 출시
마이크로칩, 보안 기능을 확장한 maXTouch 터치스크린 컨트롤러 제품군 출시 마우저, 2024년 1분기에 1만 종 이상의 신제품 추가
마우저, 2024년 1분기에 1만 종 이상의 신제품 추가 ST, 집약적 움직임 분석 지원하는 관성 모듈로 엣지-AI 센서 제품군 확장
ST, 집약적 움직임 분석 지원하는 관성 모듈로 엣지-AI 센서 제품군 확장 HMS 네트웍스, AGV를 위한 첨단 무선 기술 지원
HMS 네트웍스, AGV를 위한 첨단 무선 기술 지원 리미니스트리트 ‘2024 리미니스트리트 써밋’, 엔터프라이즈 소프트웨어 유지보수 혁신 지원
리미니스트리트 ‘2024 리미니스트리트 써밋’, 엔터프라이즈 소프트웨어 유지보수 혁신 지원
- ST, 2024 지속가능성 보고서 발표
- 마우저, IoT 및 에너지 하베스팅 설계 세미나 개최
- 매스웍스코리아, 다양한 분야의 AI 인재 발굴 위한 ‘제4회 매트랩 대학생 AI 경진대회’ 개최
- 다쏘시스템과 HD현대중공업, 버추얼 트윈 기반 설계-생산 일관화 통합 플랫폼 구축
- ams OSRAM과 도미넌트 옵토 테크놀로지스, 지능형 RGB LED로 스마트 자동차 실내 조명 구현
- 원프레딕트, 산업 AI 설비관리 솔루션으로 국제전기전력전시회 참가
그래픽 / 영상
 지멘스 EDA, 최첨단 SoC 설계를 위한 혁신적인 에뮬레이션 및 프로토타이핑 솔루션 발표
지멘스 EDA, 최첨단 SoC 설계를 위한 혁신적인 에뮬레이션 및 프로토타이핑 솔루션 발표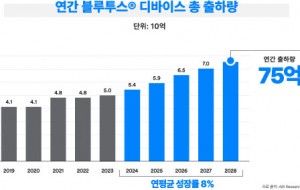 블루투스 지원 기기 출하량, 향후 5년 동안 연평균 8% 성장 전망
블루투스 지원 기기 출하량, 향후 5년 동안 연평균 8% 성장 전망 인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기
인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기
많이 본 뉴스
 인텔, 세계 최대규모 뉴로모픽 시스템 공개
인텔, 세계 최대규모 뉴로모픽 시스템 공개 코닝 반 홀(Vaughn Hall) 한국 총괄사장, 코닝의 한국 지역 법인 통합 운영
코닝 반 홀(Vaughn Hall) 한국 총괄사장, 코닝의 한국 지역 법인 통합 운영 디지키, 'Farm Different' 동영상 시리즈 시즌 3 공개
디지키, 'Farm Different' 동영상 시리즈 시즌 3 공개 산업 현장과 클라우드 연결을 지원하는 에머슨의 새로운 견고한 컴팩트 PC
산업 현장과 클라우드 연결을 지원하는 에머슨의 새로운 견고한 컴팩트 PC 에이디링크, 첨단 엣지 산업용 및 AI 솔루션을 위해 14세대 인텔 프로세서 지원 발표
에이디링크, 첨단 엣지 산업용 및 AI 솔루션을 위해 14세대 인텔 프로세서 지원 발표 지멘스, ‘아이온 모빌리티’ 개발 지원으로 동남아 전기 바이크 시장 확대
지멘스, ‘아이온 모빌리티’ 개발 지원으로 동남아 전기 바이크 시장 확대 엔비디아, cuPQC 소프트웨어로 포스트 양자 암호 촉진
엔비디아, cuPQC 소프트웨어로 포스트 양자 암호 촉진 로데슈바르즈, NTN NB-IoT 테스트 케이스의 신규 GCF 인증 획득
로데슈바르즈, NTN NB-IoT 테스트 케이스의 신규 GCF 인증 획득 온세미, 차세대 전기화학 센서 솔루션 출시
온세미, 차세대 전기화학 센서 솔루션 출시 ST의 RS-485 트랜시버, 산업 자동화, 스마트 빌딩, 로보틱스의 최첨단 애플리케이션 지원
ST의 RS-485 트랜시버, 산업 자동화, 스마트 빌딩, 로보틱스의 최첨단 애플리케이션 지원