글/ 헌터 프레버그(Hunter Freberg) 기술 마케팅 엔지니어, 밥 카드(Bob Card) ASG 마케팅 매니저, 온세미
자율이동로봇(AMR)은 제조, 물류와 창고, 농업, 소매업, 서비스업 등 다양한 산업 분야에서 점점 더 보편화되고 있다. 이러한 로봇은 효율성 향상, 생산성 증대, 안전한 작업 환경 등 여러 가지 이점을 제공한다. 본 기고에서는 모터와 컨트롤러, 센서, 조명, 통신 인터페이스를 비롯한 AMR 애플리케이션과 구성에 사용되는 다양한 부품들에 대한 요구 사항에 대해 설명한다. 또한 이러한 다양한 요구 사항을 신속하게 해결할 수 있는 온세미의 적절한 솔루션도 제안한다.

그림1. 온세미 제품 기반 AMR을 위한 솔루션
AMR 애플리케이션과 이점
공장에서 AMR을 사용하면 상품을 운송하고 품질 관리 절차를 구현하는 데 도움을 받을 수 있다. 물류와 창고에서는 상품 적재와 하역 작업에서 AMR을 활용할 수 있다. 또한 농부에게 제공되는 AMR의 몇 가지 이점에는 보다 정밀한 작물 모니터링과 토양 분석을 통해 생산성을 높일 수 있다. 소매와 숙박 분야에서는 AMR을 사용하여 주문을 전달하고 매장 주변을 안내하여 더 나은 고객 서비스를 제공할 수 있고, 직원들은 고객과 소통할 수 있는 시간을 확보할 수 있다. 기본적인 기술이 발전함에 따라 AMR이 배치되는 애플리케이션과 분야는 계속 성장할 것이다.
AMR의 모터와 모터 제어
모터 구동식 액추에이터는 AMR의 핵심 요소로써, 암(arm), 리프트 플랫폼과 바퀴를 움직일 수 있게 해준다. 액추에이터를 선택하려면 브러시리스 DC(BLDC) 모터, 모터 컨트롤러, MOSFET, 범용 컨트롤러 보드(UCB), 게이트 드라이버와 같은 부품들을 평가해야 한다. BLDC 모터는 효율이 높고 소음이 거의 발생하지 않으며 유지 관리가 덜 필요하므로 신뢰성이 높다. 이러한 이유로 AMR에서 널리 사용된다.
이 액추에이터는 토크 대비 중량 비율(torque-to-weight ratio)이 높기 때문에 모터 컨트롤러는 모터의 속도와 방향을 정밀한 움직임 프로파일로 관리할 수 있다. 또한 제어 알고리즘이 내장된 완전 통합형 또는 전용 마이크로컨트롤러 유닛(MCU)을 사용하여 제어 알고리즘을 구현할 수 있다.
AMR에서 흔히 사용되는 3상 BLDC 모터는 모터의 권선에 연결된 3개의 하이 사이드와 3개의 로우 사이드 전력 트랜지스터로 구동되어 이러한 코일에 전력을 공급하고 로터를 회전시키는 자기장을 생성할 수 있다. 커뮤테이션 알고리즘은 스위치를 켜고 끄기 위해 이러한 스위치에 적용되는 펄스 폭 변조(PWM) 신호를 생성하는 데 사용된다. 커뮤테이션 방식의 몇 가지 예로는 사인파(sinusoidal), 사다리꼴, 자속기준제어가 있다. AMR에 사용되는 모터 제어 스위치는 일반적으로 실리콘 기반인데, AMR에 사용되는 BLDC는 일반적으로 48V 이하이기 때문이다.
빠른 AMR 개발을 위해 온세미에서는 여러 BLDC 모터 제어 솔루션을 제공한다. 여기에는24V ~ 600V 외에도 통합 3상 게이트 드라이브, 통합 정밀 감지 증폭기(4x), 통합 부트스트랩 다이오드를 갖춘 ECS640A 에코스핀(ecoSpin) ARM 코어텍스(Cortex) BLDC 모터 컨트롤러가 포함된다. 온세미는 저비용 솔루션으로 NCD83591 5V~60V 3상 BLDC 게이트 드라이버를 제공한다.
또한 온세미는 BLDC용 자일링스(Xilinx) 징크(Zynq)-7000 SoC를 기반으로 하는 시스템 온 모듈(SoM)을 제공한다. 이 UCB는 정밀한 제어가 필요한 애플리케이션에 이상적이며 인공 지능(AI) 기능을 구현하는 데에도 사용할 수 있다.
AMR의 고성능 모터 애플리케이션을 위해 온세미는 다양한 중전압(MV) MOSFET도 제공한다. 온세미의 최신 T10 실리콘 MOSFET은 낮은 온 저항(RDSon), 낮은 게이트 전하와 고유한 스너버 유사 기능을 갖춘 차폐형 게이트 트렌치 기술을 기반으로 오버슈트를 줄이고 링잉을 최소화한다. 온세미의 40V와 80V T10 MOSFET은 각각 0.42mΩ, 1.5mΩ으로 업계 최고의 RDSon을 제공한다. 또한 전압 스파이크 감소를 위해 낮은 게이트 전하와 동급 최고의 소프트 리커버리 기능을 제공한다. NTMFS0D4N04XM, NTMFWS1D5N08, 기타 MV MOSFET 포트폴리오에 대한 자세한 내용은 온세미 홈페이지에서 확인할 수 있다.
AMR용 센서
AMR은 주변 환경을 모니터링하고 상호 작용해야 하므로 관련 데이터를 수집하기 위해 다양한 유형의 센서가 필요하다. AMR에 일반적으로 배포되는 센서에는 온도, 이미지 센서, LiDAR(3D 매핑용), 회전 운동, VLC(visual light communications) 센서가 포함된다. 이미지 센서와 이미지 신호 프로세서는 시각적 인식을 가능하게 하여 AMR이 물체를 감지하고 인식한 다음 적절한 조치를 취함으로써 주변 환경을 탐색할 수 있도록 한다.
온세미는 이러한 애플리케이션에 이상적인 글로벌 셔터와 롤링 셔터 이미지 센서를 제공한다. 예를 들어 AR0234CS 이미지 센서는 빠르게 움직이는 장면(초당 120프레임)을 전체 해상도로 정확하게 캡처하고, 머신 비전이나 바코드 스캔을 위한 선명한 이미지를 생성하는 데 최적화된 혁신적인 글로벌 셔터 픽셀 디자인을 기반으로 한다. 위치 센서는 로봇의 바퀴나 기타 움직이는 부품의 회전을 측정하여 로봇의 위치와 방향을 정확하게 추적할 수 있다. 초음파와 적외선 센서는 원격 물체까지의 거리를 측정하여 AMR이 장애물을 감지하고 충돌을 피할 수 있도록 한다.
온세미의 NCS32100은 정확성과 속도를 겸비한 산업용 회전식 위치 센서다. 이 센서는 38mm 센서를 탑재하고 있으며 6,000RPM에서 +/-50 arcsec의 정확도를 제공한다. 정확도가 낮은 애플리케이션의 경우 최대 100,000RPM의 속도를 지원할 수 있다. 이 새로운 디바이스는 산업과 로봇 애플리케이션 모두에 이상적인 유도 위치 감지에 대해 특허를 받은 접근 방식을 사용한다.
AMR 전원 공급
전력 공급과 전력 트리 기술(Power Tree technology)은 AMR의 배터리 수명과 작동 기능에 영향을 미치는 중요한 구성 요소이다. AMR의 전원 시스템을 선택할 때 중요한 성능 특성과 매개변수에는 에너지 밀도, 전압 및 전류 요구 사항, 효율성, 솔루션 크기 등이 포함된다. 리튬 이온 배터리는 에너지 밀도가 높고 수명이 길기 때문에 AMR에서 일반적으로 사용된다.
전원 관리 장치는 배터리에서 다른 구성 요소로의 전력 흐름을 조절하는 동시에 스위칭 변환기와 전압 조정기로 구성된 전력 트리는 적절한 전압과 전류 수준을 수신하도록 보장한다. 예를 들어, FAN65008B 동기식 PWM 벅 레귤레이터는 98%의 피크 효율을 달성하여 48V 입력을 28V 출력으로 강압하는 동시에 10A DC 부하를 일정하게 공급한다. NCP1632 역률 컨트롤러(PFC), NCP1399 LLC 컨트롤러, NCP4307 동기식 정류기 컨트롤러(SRC)는 함께 작동하여 최대 1kW의 전원 공급 장치에서 AC를 DC로 변환할 때 효율성을 최적화한다.
온세미의 엘리트 실리콘 카바이드(EliteSiC) MOSFET은 일반적으로 3kW 이상의 고전력 애플리케이션에서 AC-DC와 DC-DC 전력 변환에 이상적이다. AMR의 배터리를 충전하려면 가정용 또는 산업용 AC 공급 장치를 사용 가능한 중전압 DC 출력으로 변환해야 한다. AC-DC 프론트 엔드와 DC-DC 컨버터의 1차측 모두 EliteSiC FET의 이점을 누릴 수 있다. DC-DC 컨버터의 2차측에는 스위칭에 최적화된 온세미 트렌치 MOSFET을 사용할 수 있다.
조명
발광 다이오드(LED)와 같은 조명 기술이 중요한 이유는 AMR이 다양한 환경에서 탐색, 통신, 작동할 수 있게 해준다는 점이다. 조명은 신호를 전달하고 AMR의 상태나 방향을 표시하는 데에도 사용된다. AMR용 조명 기술을 선택할 때 고려해야 할 성능 특성과 매개변수에는 밝기, 색온도, 전력 소비 등이 있다.
LED 컨트롤러와 드라이버는 LED에 흐르는 전류의 양을 모니터링하여 특정 강도와 파장의 빛을 방출할 수 있도록 하는 중요한 구성 요소이다. LED 드라이버 회로는 하이 사이드와 로우 사이드 전력 MOSFET을 사용하여 LED 전류를 켜고 끄고 과전압, 과전류 조건으로부터 보호한다. 또한 LED 드라이버 회로의 안정성을 보장한다. 온세미의 NCV7685 LED 선형 전류 드라이버와 NCL31000은 AMR 조명 애플리케이션에 이상적인 지능형 LED 드라이버이다. NCV7685에는 공통 레퍼런스가 있는 12개의 선형 프로그래밍 가능 정전류 소스가 있어 128개의 서로 다른 PWM 조정 가능 듀티 사이클 레벨이 가능하다. NCL31000은 고대역폭 아날로그와 PWM 디밍(제로 전류까지)을 지원하는 고효율 벅 LED 드라이버, 두 개의 보조 DC-DC 컨버터, 입력과 출력 전류, 전압, LED 온도, DC-DC 전압을 모니터링하는 진단 기능을 갖추고 있다.
NCL31000은 가시광선을 캐리어로 사용하여 최대 10kb/s의 단방향 데이터를 전송하는 가시광선 통신(VLC)을 지원한다. VLC를 통해 AMR은 다른 디바이스, 사람과 안전하게 통신할 수 있다. 가시광선 스펙트럼이 430 THz~790THz이기 때문에 VLC는 블루투스LE(Bluetooth LE), 지그비(Zigbee), UWB, 와이파이(Wi-Fi)와 같은 주변 무선 기술에 영향을 미치지 않는다. VLC는 본질적으로 가시거리로 제한되기 때문에 안전하다. 창고 애플리케이션에서 AMR의 내비게이션은 UWB, 블루투스 LE(AoA/AoD), 와이파이 실내 위치추적 시스템(IPS)의 이점을 활용한다.
하지만 때때로 RF 혼잡이나 간섭으로 인해 IPS가 손상될 수 있다. 이를 완화하기 위해 각 천장 조명기구가 고유 ID 번호를 전송하는 천장 조명기구 그리드에 VLC를 설치하여 기존 RF IPS를 보완할 수 있다. AMR에 각 조명기구의 위치와 고유 ID가 포함된 평면도 데이터베이스가 포함되어 있는 경우, AMR은 아래 그림 2와 같이 천장을 향한 간단한 포토다이오드를 사용하여 자체 탐색할 수 있다.

그림2. 실내 위치 시스템(IPS)에 VLC를 사용하는 AMR
통신
무선 통신 기술은 데이터를 전송하고 명령을 수신하여 다른 디바이스, 시스템과 통신하고 상호 작용할 수 있으므로, AMR에 필수적이다. AMR용 통신 기술을 선택할 때 고려해야 할 성능 특성과 매개변수에는 작동 범위, 데이터 속도, 전력 소비, 보안이 포함된다. 작동 범위는 적절한 데이터 속도를 활용하여 주변 환경의 다른 디바이스, 시스템과 적절하게 통신할 수 있어야 한다. 전력 소비는 배터리 수명을 최대한 오래 유지할 수 있을 정도로 충분히 낮아야 하며, 보안은 AMR 데이터와 명령이 액세스되거나 손상되지 않도록 보호하는 데 매우 중요하다.
블루투스 LE는 저전력 소비를 위해 설계된 무선 통신 기술로, 배터리로 구동되는 디바이스에 이상적이다. 이는 AMR과 다른 디바이스 간에 센서 데이터, 제어 신호를 전송하기 위한 다양한 데이터 전송 속도를 지원한다. 블루투스 LE는 실내 위치 시스템에서도 사용할 수 있어 AMR이 동적 환경을 탐색할 수 있다. 온세미의 RSL15는 구현하기 쉬운 블루투스 LE 무선 애플리케이션을 위한 블루투스 5.2 인증 트랜시버로, AOA(Angle of Arrival) 및 AOD(Angle of Departure) 주요 기능을 지원하여 정확한 실내 위치 시스템 (IPS)을 구현한다. 고도로 통합된 무선 SoC(system on chip)는 시스템 크기와 배터리 수명을 최적화한다. 또한 ARM 코어텍스-M33 프로세서와 2.4GHz 트랜시버를 탑재하고 있으며, 블루투스 LE 5.2와 2.4GHz 맞춤형 프로토콜을 지원한다.
개별 AMR은 온보드 중앙 컴퓨터와 개별 모터 컨트롤러, 조명 컨트롤러 센서 간의 실시간 제어를 위해 내부 유선 디지털 통신이 필요하다. CAN(2Mbps) 또는 CAN-FD(5Mbps)는 수년 동안 일반적인 프로토콜로 선택되어 왔다. 두 프로토콜 모두 UTP(unshielded twisted pair) 케이블을 통해 통신하며, 개별 노드를 데이지 체인, 멀티 드롭 방식으로 구성할 수 있어 케이블 무게와 비용을 절감할 수 있다.
이더넷 연합은 최근 10BASE-T1S(10Mbps)를 도입했는데, 이는 최소 25미터의 UTP 또는 싱글 페어 이더넷(SPE)에 걸쳐 최소 8개의 노드로 데이지 체인, 멀티 드롭, 타이폴로지 방식으로 통신할 수 있는 이더넷 IP 기반 디지털 통신 프로토콜이다. CAN과 CAN-FD에 비해 10BASE-T1S의 주요 장점은 빠른 데이터 속도와 브레인에서 엣지 노드에 이르는 모든 IP 기반 이더넷 통신 프로토콜 도메인으로 인공지능(AI), 머신 러닝을 촉진한다는 것이다.
온세미의 NCN26010 10BASE-T1S 산업용 이더넷 트랜시버는 기존 연선 케이블을 사용하는 산업용 애플리케이션을 위한 멀티 드롭 이더넷 통신을 지원한다. 또한 IEEE 802.3cg를 준수하며 MAC(Media Access Controller), PLCA RS(Reconciliation Sublayer), 산업용 멀티드롭 이더넷용으로 설계된 10BASE-T1S PHY를 포함한다. UTP를 통해 데이터를 송수신할 수 있는 모든 물리 계층 기능을 제공하며, 오픈 얼라이언스(Open Alliance) MACPHY SPI 프로토콜을 사용하여 호스트 MCU와 통신할 수 있다.
AMR 애플리케이션은 다양한 산업 분야에서 계속 성장하고 있다. 그러나 자율적이고 안정적이며 안전하게 작동하려면 여러 가지 기술을 통합해야 하는 복잡한 시스템이다. 이러한 시스템의 성공 여부는 설계 단계에서 최고의 기술을 선택하는 데 달려 있다.
저작권©올포칩 미디어. 무단전재 및 재배포를 금지합니다.
 인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기우리가 온라인에서 취하는 모든 행동이 치밀하게 수집되고 있으며, 우리의 관심에 목말라 하는 앱과 사이트들은 어떻게 해야 우리가 자신들을 선택하게 만들지 알게 되었다. 우리가 평소에 소비하는 것과 비슷한 콘텐츠들에만 노출되는 현상을 ‘필터 버블(Filter Bubble)’이라고 한다. 사이트와 웹들이 우리가 관심이 없을 것이라고 생각한 콘텐츠들을 필터링하면 결국 우리는 개인화된 버블 안에 갇히게 되고 그 속에서 볼링 경기는 존재하지 않을 것이다.
인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기우리가 온라인에서 취하는 모든 행동이 치밀하게 수집되고 있으며, 우리의 관심에 목말라 하는 앱과 사이트들은 어떻게 해야 우리가 자신들을 선택하게 만들지 알게 되었다. 우리가 평소에 소비하는 것과 비슷한 콘텐츠들에만 노출되는 현상을 ‘필터 버블(Filter Bubble)’이라고 한다. 사이트와 웹들이 우리가 관심이 없을 것이라고 생각한 콘텐츠들을 필터링하면 결국 우리는 개인화된 버블 안에 갇히게 되고 그 속에서 볼링 경기는 존재하지 않을 것이다. 결정론, 새로운 이더넷 애플리케이션을 열다새로운 네트워크 프로토콜은 성능에서 다른 부분들이 있지만, 일반적으로 더 많은 데이터 처리량을 제공하기 위해 개발된다. 예를 들어, 공장, 건물의 센서와 액추에이터는 데이터가 거의 필요하지 않지만 ‘엣지’에서 작동하려면 다른 사항들이 요구된다.
결정론, 새로운 이더넷 애플리케이션을 열다새로운 네트워크 프로토콜은 성능에서 다른 부분들이 있지만, 일반적으로 더 많은 데이터 처리량을 제공하기 위해 개발된다. 예를 들어, 공장, 건물의 센서와 액추에이터는 데이터가 거의 필요하지 않지만 ‘엣지’에서 작동하려면 다른 사항들이 요구된다. 센서를 이용한 소방관들의 안전 개선재난 현장에서 소방관들이 소지하는 응급 구조 장비들 외에도, 이들의 안전을 위해서 다양한 방식으로 첨단 기술을 활용할 수 있다. 웨어러블 기술을 활용해서 팀원 중의 누군가 심박수나 혈압이 급격히 상승하거나 여타 생체 데이터가 변화되는 것을 감독관에게 알려줄 수 있으며, 환경 센서들을 사용해서 주변 환경으로 어떠한 유독성 화학 물질이 존재하는지 파악할 수 있다.
센서를 이용한 소방관들의 안전 개선재난 현장에서 소방관들이 소지하는 응급 구조 장비들 외에도, 이들의 안전을 위해서 다양한 방식으로 첨단 기술을 활용할 수 있다. 웨어러블 기술을 활용해서 팀원 중의 누군가 심박수나 혈압이 급격히 상승하거나 여타 생체 데이터가 변화되는 것을 감독관에게 알려줄 수 있으며, 환경 센서들을 사용해서 주변 환경으로 어떠한 유독성 화학 물질이 존재하는지 파악할 수 있다. 동적 전압 스케일링을 활용한 정밀 전압 레귤레이션이 글에서는 동적 전압 스케일링(DVS: Dynamic Voltage Scaling)을 활용하여 정밀 전압 레귤레이션을 달성하는 방법에 대해 알아본다. DVS는 부하 트랜션트를 예상하여 출력 전압을 약간 높이거나 낮추도록 조절하는 프로세스를 말한다. 또한 이 글에서는 특정 IC를 사용해서 신뢰할 수 있는 전압 모니터링을 달성하는 방법에 대해서도 설명한다.
동적 전압 스케일링을 활용한 정밀 전압 레귤레이션이 글에서는 동적 전압 스케일링(DVS: Dynamic Voltage Scaling)을 활용하여 정밀 전압 레귤레이션을 달성하는 방법에 대해 알아본다. DVS는 부하 트랜션트를 예상하여 출력 전압을 약간 높이거나 낮추도록 조절하는 프로세스를 말한다. 또한 이 글에서는 특정 IC를 사용해서 신뢰할 수 있는 전압 모니터링을 달성하는 방법에 대해서도 설명한다. 전기기계적 접속을 위한 1-Wire Contact Package 부착 방법이 글에서는 전기기계적 접속을 위한 아나로그디바이스(Analog Devices)의 특허기술인 1-Wire Contact Package 솔루션에 대해 알아보고, 기존 패키징 솔루션과 비교해 1-Wire Contact Package 솔루션의 장점에 대해 살펴보고자 한다. 이와 함께 액세서리나 소모품에 이 솔루션을 부착하는 방법을 설명하고, 기계적 특징들과 신뢰성 분석 정보들을 제공한다.
전기기계적 접속을 위한 1-Wire Contact Package 부착 방법이 글에서는 전기기계적 접속을 위한 아나로그디바이스(Analog Devices)의 특허기술인 1-Wire Contact Package 솔루션에 대해 알아보고, 기존 패키징 솔루션과 비교해 1-Wire Contact Package 솔루션의 장점에 대해 살펴보고자 한다. 이와 함께 액세서리나 소모품에 이 솔루션을 부착하는 방법을 설명하고, 기계적 특징들과 신뢰성 분석 정보들을 제공한다. 차량용 배터리 성능을 향상시키는 IOXUS의 uSTART 울트라 커패시터차량용 모터는 정차 후 출발할 때마다 상당한 양의 연료를 소모하고 부품들을 더 빨리 마모시킨다. 이 글에서는 IOXUS의 uSTART 울트라 커패시터를 활용해서 차량이 정차했다 출발할 때 배터리와 함께 높은 출력을 제공함으로써 연료 소모를 저감하고 부품 마모를 늦추며 향상된 시스템 성능을 달성할 수 있다는 것을 설명한다.
차량용 배터리 성능을 향상시키는 IOXUS의 uSTART 울트라 커패시터차량용 모터는 정차 후 출발할 때마다 상당한 양의 연료를 소모하고 부품들을 더 빨리 마모시킨다. 이 글에서는 IOXUS의 uSTART 울트라 커패시터를 활용해서 차량이 정차했다 출발할 때 배터리와 함께 높은 출력을 제공함으로써 연료 소모를 저감하고 부품 마모를 늦추며 향상된 시스템 성능을 달성할 수 있다는 것을 설명한다. 소형 자산추적 장치의 배터리 수명을 연장하는 소형 고효율 벅 컨버터오늘날에는 새로운 저전력 데이터 네트워크의 낮은 구축 비용 덕분에 자산 추적 솔루션이 폭발적으로 증가했다. 이러한 영향은 운송이나 공급망 관리 같은 애플리케이션에서 두드러지게 나타나고 있다. 이러한 애플리케이션에서 센서는 주어진 위치에서 업데이트를 하고 온도, 습도, 압력, 모션 같은 데이터를 전송한다. 센서는 소량의 데이터만 전송하면 되므로 커버리지를 높이고 전력 소모를 최소화하여 기기를 더 긴 시간 동안 사용할 수 있게 한다. 이러한 센서의 배터리는 수 주일에서 길게는 수 년 동안 지속할 수 있어야 한다.
소형 자산추적 장치의 배터리 수명을 연장하는 소형 고효율 벅 컨버터오늘날에는 새로운 저전력 데이터 네트워크의 낮은 구축 비용 덕분에 자산 추적 솔루션이 폭발적으로 증가했다. 이러한 영향은 운송이나 공급망 관리 같은 애플리케이션에서 두드러지게 나타나고 있다. 이러한 애플리케이션에서 센서는 주어진 위치에서 업데이트를 하고 온도, 습도, 압력, 모션 같은 데이터를 전송한다. 센서는 소량의 데이터만 전송하면 되므로 커버리지를 높이고 전력 소모를 최소화하여 기기를 더 긴 시간 동안 사용할 수 있게 한다. 이러한 센서의 배터리는 수 주일에서 길게는 수 년 동안 지속할 수 있어야 한다. 자동차 시스템 설계의 전력 밀도 높이는 상부 냉각 MOSFET완전 전기화와 마찬가지로 완전 자율주행은 차량 설계 및 제조에서 차세대 패러다임이 될 것이다. 첨단운전자지원시스템(ADAS)으로 지원되는 반자율주행은 이미 외부 센서와 온보드 카메라의 데이터 융합을 비롯해 다양한 애플리케이션을 관리하는 전자제어장치(ECU) 수를 크게 증가시켰다. 이러한 제어기의 전력 소비는 데이터 처리량과 속도에 따라 증가한다.
자동차 시스템 설계의 전력 밀도 높이는 상부 냉각 MOSFET완전 전기화와 마찬가지로 완전 자율주행은 차량 설계 및 제조에서 차세대 패러다임이 될 것이다. 첨단운전자지원시스템(ADAS)으로 지원되는 반자율주행은 이미 외부 센서와 온보드 카메라의 데이터 융합을 비롯해 다양한 애플리케이션을 관리하는 전자제어장치(ECU) 수를 크게 증가시켰다. 이러한 제어기의 전력 소비는 데이터 처리량과 속도에 따라 증가한다. 피에조-포토트로닉스란 무엇인가?피에조일렉트릭(압전) 소자는 기계적 스트레스나 하중이 가해졌을 때 전기 전하를 발생시키는 소자들을 총칭하는 것이다. 어떤 형태의 물리적 변형이든 전기 전하를 발생시킨다. 피에조일렉트릭 소자는 다양한 애플리케이션과 전자 시스템에 활용되고 있다.
피에조-포토트로닉스란 무엇인가?피에조일렉트릭(압전) 소자는 기계적 스트레스나 하중이 가해졌을 때 전기 전하를 발생시키는 소자들을 총칭하는 것이다. 어떤 형태의 물리적 변형이든 전기 전하를 발생시킨다. 피에조일렉트릭 소자는 다양한 애플리케이션과 전자 시스템에 활용되고 있다. 스마트 팩토리 요건에 부합하는 RTD 기반 온도 센서 재설계 방법이 글에서는 더 작은 폼 팩터, 유연한 통신, 원격 설정 기능을 갖춘 온도 측정 장치에 대한 스마트 팩토리의 요구 사항을 충족하기 위해 저항 온도 감지기(resistance temperature detector, RTD) 산업용 온도 센서를 신속하게 재설계하는 방법에 대해 설명한다. 통합 수준이 높은 아날로그 프런트 엔드(AFE)와 IO-Link® 송수신기를 사용함으로써 이 작업을 수행할 수 있다.
스마트 팩토리 요건에 부합하는 RTD 기반 온도 센서 재설계 방법이 글에서는 더 작은 폼 팩터, 유연한 통신, 원격 설정 기능을 갖춘 온도 측정 장치에 대한 스마트 팩토리의 요구 사항을 충족하기 위해 저항 온도 감지기(resistance temperature detector, RTD) 산업용 온도 센서를 신속하게 재설계하는 방법에 대해 설명한다. 통합 수준이 높은 아날로그 프런트 엔드(AFE)와 IO-Link® 송수신기를 사용함으로써 이 작업을 수행할 수 있다. 전압 컨버터를 활용하여 배터리 효율을 높이고 사용 시간을 늘리는 방법이 글에서는 기존 시스템에 아나로그디바이스(ADI)의 나노파워(nanoPower) 컨버터를 이용하여 배터리 사용 시간을 최대 20% 더 늘리는 방법에 대해 설명한다.
회로의 에너지 효율이 좋아야 배터리가 오랫동안 지속될 수 있다. 이러한 이유에서 시스템 설계 시 에너지 효율이 우수한 부품들을 선택해야 한다. 전자 회로에서 기능 블록의 수가 적을수록 시스템 전반에서 더 높은 에너지 효율을 달성할 수 있다. 그림 1은 배터리 전원으로 작동하는 장치의 사례로서 전자식 수도 계량기를 나타낸 것이다. 이 시스템은 아나로그디바이스의 MAX32662 마이크로컨트롤러를 기반으로 하며, 하나의 전원 전압만을 사용한다. 입력 전압 범위는 1.71V ~ 3.63V이다.
전압 컨버터를 활용하여 배터리 효율을 높이고 사용 시간을 늘리는 방법이 글에서는 기존 시스템에 아나로그디바이스(ADI)의 나노파워(nanoPower) 컨버터를 이용하여 배터리 사용 시간을 최대 20% 더 늘리는 방법에 대해 설명한다.
회로의 에너지 효율이 좋아야 배터리가 오랫동안 지속될 수 있다. 이러한 이유에서 시스템 설계 시 에너지 효율이 우수한 부품들을 선택해야 한다. 전자 회로에서 기능 블록의 수가 적을수록 시스템 전반에서 더 높은 에너지 효율을 달성할 수 있다. 그림 1은 배터리 전원으로 작동하는 장치의 사례로서 전자식 수도 계량기를 나타낸 것이다. 이 시스템은 아나로그디바이스의 MAX32662 마이크로컨트롤러를 기반으로 하며, 하나의 전원 전압만을 사용한다. 입력 전압 범위는 1.71V ~ 3.63V이다. 산업용 모터 제어 개선하는 유도 위치 센서현대의 많은 기계 중심에는 최소한 하나의 모터가 있다. 로봇, 엘리베이터, 자동차, 전동 공구 등의 발전을 위해서는 모터를 더욱 정밀하게 제어하는 것이 중요하다. 모터의 성능은 정밀한 제어 능력으로 결정되고, 정밀한 제어 능력은 모터의 위치를 정확하게 감지하는 것에 달려 있다. 그리고 정밀한 감지 능력 정확한 센서 기술의 성장에 의존한다.
산업용 모터 제어 개선하는 유도 위치 센서현대의 많은 기계 중심에는 최소한 하나의 모터가 있다. 로봇, 엘리베이터, 자동차, 전동 공구 등의 발전을 위해서는 모터를 더욱 정밀하게 제어하는 것이 중요하다. 모터의 성능은 정밀한 제어 능력으로 결정되고, 정밀한 제어 능력은 모터의 위치를 정확하게 감지하는 것에 달려 있다. 그리고 정밀한 감지 능력 정확한 센서 기술의 성장에 의존한다. 효율과 지속 가능성을 고려한 스마트 빌딩 설계스마트 빌딩은 인텔리전트 에지 기술을 활용하여 사물 인터넷(IoT) 연결 장치와 증강 현실(AR), 시각 및 모션 센서, 그 밖에 다른 시스템을 통합하여 실내 온도 조절, 보안, 조명 등 일상적인 제어 업무를 자동화하는 것으로, 이 모든 것은 효율 극대화와 입주자의 경험 향상으로 이어진다.
효율과 지속 가능성을 고려한 스마트 빌딩 설계스마트 빌딩은 인텔리전트 에지 기술을 활용하여 사물 인터넷(IoT) 연결 장치와 증강 현실(AR), 시각 및 모션 센서, 그 밖에 다른 시스템을 통합하여 실내 온도 조절, 보안, 조명 등 일상적인 제어 업무를 자동화하는 것으로, 이 모든 것은 효율 극대화와 입주자의 경험 향상으로 이어진다. PoE 용 전원 서브시스템 설계PoE(Power over Ethernet) 기술을 활용하면 기존의 CAT5/5e/6 이더넷 케이블을 통해 데이터 전송과 전원 공급을 할 수 있다. 이 글에서는 PoE 시스템 설계, 그 중에서도 특히 PD(powered device) 전원 서브시스템 설계에 관해서 자세히 알아본다.
PoE 용 전원 서브시스템 설계PoE(Power over Ethernet) 기술을 활용하면 기존의 CAT5/5e/6 이더넷 케이블을 통해 데이터 전송과 전원 공급을 할 수 있다. 이 글에서는 PoE 시스템 설계, 그 중에서도 특히 PD(powered device) 전원 서브시스템 설계에 관해서 자세히 알아본다.
 로지텍, 미니멀 라이프를 즐기자: ‘미니멀테리어’에 최적화된 추천 아이템 3
로지텍, 미니멀 라이프를 즐기자: ‘미니멀테리어’에 최적화된 추천 아이템 3 마이크로칩, 임베디드 보안 기능을 간단하게 통합할 수 있는 32비트 마이크로컨트롤러 출시
마이크로칩, 임베디드 보안 기능을 간단하게 통합할 수 있는 32비트 마이크로컨트롤러 출시 한국마이크로소프트, AI 기술의 미래 조명하는 ‘AI Tour in Seoul’ 개최
한국마이크로소프트, AI 기술의 미래 조명하는 ‘AI Tour in Seoul’ 개최 미루웨어, 국제인공지능대전(AI EXPO) 2024 참가
미루웨어, 국제인공지능대전(AI EXPO) 2024 참가 플리어의 T5xx 전문가용 열화상 카메라, 전기시설 점검을 위한 필수 장비로 활용
플리어의 T5xx 전문가용 열화상 카메라, 전기시설 점검을 위한 필수 장비로 활용
- 델 테크놀로지스 보고서, 생성형 AI가 기업의 성과 창출에 기여
- KT, 안전 플랫폼 ‘올 인 세이프티’ 도입으로 AI 기반 안전 관리 기능 강화
- 페펄앤드푹스, Ethernet-APL 기반의 액티브 인프라 지원
- NCH코리아, 산업 윤활관리 프로그램 런칭
- 로지텍, ‘시그니처 슬림’ 시리즈로 뛰어난 멀티 디바이스 경험 제공
- 마우저, 인텔의 새로운 독립 FPGA 기업인 알테라 제품 공급
그래픽 / 영상
 지멘스 EDA, 최첨단 SoC 설계를 위한 혁신적인 에뮬레이션 및 프로토타이핑 솔루션 발표
지멘스 EDA, 최첨단 SoC 설계를 위한 혁신적인 에뮬레이션 및 프로토타이핑 솔루션 발표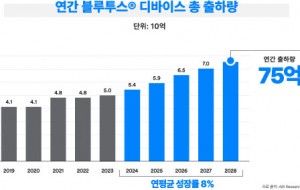 블루투스 지원 기기 출하량, 향후 5년 동안 연평균 8% 성장 전망
블루투스 지원 기기 출하량, 향후 5년 동안 연평균 8% 성장 전망 인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기
인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기
많이 본 뉴스
 ST, 창의적 센싱 개발을 위한 올인원 MEMS 스튜디오 데스크톱 소프트웨어 솔루션 출시
ST, 창의적 센싱 개발을 위한 올인원 MEMS 스튜디오 데스크톱 소프트웨어 솔루션 출시 데이터브릭스, 범용 대형언어모델 ‘DBRX’로 효율적인 오픈소스 모델의 새로운 기준 제시
데이터브릭스, 범용 대형언어모델 ‘DBRX’로 효율적인 오픈소스 모델의 새로운 기준 제시 인텔, 기업용 생성형 AI 시장 독점 구조 타개할 선택지로 가우디 3 발표
인텔, 기업용 생성형 AI 시장 독점 구조 타개할 선택지로 가우디 3 발표 KT-AWS, 생성형AI와 모바일 분야 사업 협력 강화
KT-AWS, 생성형AI와 모바일 분야 사업 협력 강화 헥사곤-스맥, 스마트 제조 기술 개발 위한 MOU 체결
헥사곤-스맥, 스마트 제조 기술 개발 위한 MOU 체결 로옴, VCSEL과 LED의 특징을 융합한 적외선 광원 VCSELED 개발
로옴, VCSEL과 LED의 특징을 융합한 적외선 광원 VCSELED 개발 마우저, 2024년 1분기에 1만 종 이상의 신제품 추가
마우저, 2024년 1분기에 1만 종 이상의 신제품 추가 이튼, 데이터 센터 사업의 연속성 보장하는 대용량 UPS ‘9395XR’ 국내 출시
이튼, 데이터 센터 사업의 연속성 보장하는 대용량 UPS ‘9395XR’ 국내 출시 탈레스 알레니아 스페이스, 국내 최초 정찰위성 ‘425사업’ 위성의 성공적 발사 지원
탈레스 알레니아 스페이스, 국내 최초 정찰위성 ‘425사업’ 위성의 성공적 발사 지원 마우저, 머신 비전의 잠재력을 탐구한 EIT 기술 시리즈 최신호 공개
마우저, 머신 비전의 잠재력을 탐구한 EIT 기술 시리즈 최신호 공개