Occipital과 Inuitive는 차세대 혼합 현실, 증강 현실, 가상 현실(MR/AR/VR) 헤드셋 및 로봇으로 극히 효율적인 룸스케일(room-scale) 센싱과 SLAM(Simultaneous Localization and Mapping)을 구현할 수 있도록 포괄적인하드웨어 및 소프트웨어 솔루션을 제공한다고 밝혔다.
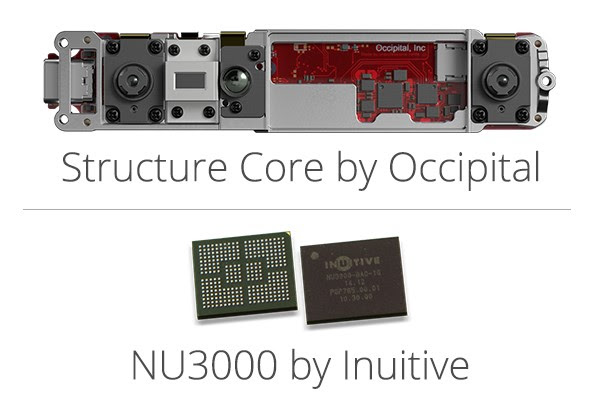
두 회사가 협력해서 개발한 이 통합적인 솔루션을 사용함으로써 AR/VR/MR 헤드셋 및 가정용/산업용 로봇 업체들이 자사의 차세대 제품에 효율적이며 지연시간이 낮은 3D 센싱 및 SLAM을 손쉽게 통합할 수 있게 되었다. 이 솔루션은 Occipital의 임베딩 Structure Core을이용한 깊이 센서와 Inuitive의 NU3000 깊이 프로세싱 칩을 결합하였다.
지난 해에 Occipital과 Inuitive가 협력해서 Structure Core와 NU3000을 긴밀한 통합을 함으로써 호스트 시스템의 부담을 최소화하고 뛰어난 사용자 경험을 달성하는 솔루션을 제공하게 되었다. Structure Core와 NU3000을 결합함으로써 높은 성능과 낮은 전력 소모를 달성한다.
시장의 선구자적인 이 솔루션은 30cm에서부터 5m 이상에 이르는 깊이를 검출할 수 있으며, 정확도는 1m일 때 최고 ±0.17% RMS이다(“fit-to-plane” 사용). 또한 이 통합적인 솔루션을 사용함으로써 6-DoF 추적일 때 최신 듀얼 코어 ARM CPU의 25% 이하로 CPU 부담을낮출 수 있다.
시스템 지연시간(카메라에서부터 자세를 완벽하게 추적하기까지)은 10ms에 불과하다. 이와 같은 높은 성능이면서 깊이 + 시각을 위한 전력 소모는 구성에 따라서 1.3W부터 2.0W까지로 낮다.
Structure Core와 함께 Occipital은 Bridge Engine을 제공한다. Bridge Engine은 첨단 MR 소프트웨어 엔진 및 개발 플랫폼이다. 다중의 플랫폼으로 제공되는 Bridge Engine을 사용함으로써 자세 추적 VR 및 혼합 현실 기능을 포함하는 상품을 빠르게 개발할 수 있다.
Structure Core와 NU3000을 결합한 이 통합적인 솔루션은 차세대 가정용/산업용 로봇과 VR/AR/MR 헤드셋에 사용하기에 적합하다. 특히 ToF(time-of-flight)나 구조화 광 깊이 센서를 사용하는 로봇의 내비게이션 시스템은 주변 햇빛 때문에 문제가 될 수 있는 경우에도, Structure Core의 dual 적외선 카메라는 깊이 검출에 유용하다.
관련 링크 : https://occipital.com/
저작권©올포칩 미디어. 무단전재 및 재배포를 금지합니다.
 리니어 테크놀로지, 전류/전압 오류에 대한 전반적인 보호 기능 제공하는 양방향 전자 회로 차단기 출시리니어 테크놀로지 코리아(대표 홍사곽)는 배터리 구동식 자동차, 산업 및 휴대용 시스템에 사용되는 2.5V ~ 60V의 전자장치의 안전 전압 및 전류 레벨을 보장할 수 있는 회로 보호 컨트롤러(제품명: LTC4368)를 개발했다고 밝혔다.
리니어 테크놀로지, 전류/전압 오류에 대한 전반적인 보호 기능 제공하는 양방향 전자 회로 차단기 출시리니어 테크놀로지 코리아(대표 홍사곽)는 배터리 구동식 자동차, 산업 및 휴대용 시스템에 사용되는 2.5V ~ 60V의 전자장치의 안전 전압 및 전류 레벨을 보장할 수 있는 회로 보호 컨트롤러(제품명: LTC4368)를 개발했다고 밝혔다.  온세미컨덕터, 혁신적인 모듈러 자동차 이미징 플랫폼 선보여에너지 효율 혁신을 주도하는 온세미컨덕터(www.onsemi.com) 가 시스템 및 소프트웨어 개발자가 연구 및 개발 활동에 카메라를 사용할 수 있도록 하는 모듈러 자동차 레퍼런스 시스템 (Modular Automotive Reference System; MARS)를 선보였다.
온세미컨덕터, 혁신적인 모듈러 자동차 이미징 플랫폼 선보여에너지 효율 혁신을 주도하는 온세미컨덕터(www.onsemi.com) 가 시스템 및 소프트웨어 개발자가 연구 및 개발 활동에 카메라를 사용할 수 있도록 하는 모듈러 자동차 레퍼런스 시스템 (Modular Automotive Reference System; MARS)를 선보였다. ST마이크로일렉트로닉스, 최신 STM32F722 누클레오 보드 및 STM32F723 디스커버리 키트 출시로 STM32 에코시스템의 유연성 확대다양한 전자 애플리케이션에 걸쳐 고객들에게 기여하는 세계적인 반도체 회사 ST마이크로일렉트로닉스(STMicroelectronics, 이하 ST)가 고성능 마이크로컨트롤러 STM32F722/723[1]의 원활한 활용을 돕기 위해 STM32F723의 독보적인 고속 USB PHY 액세스가 가능한 차세대 디스커버리 키트와 STM32F722 지원 누클레오(Nucleo) 보드 누클레오-144를 새롭게 선보였다.
ST마이크로일렉트로닉스, 최신 STM32F722 누클레오 보드 및 STM32F723 디스커버리 키트 출시로 STM32 에코시스템의 유연성 확대다양한 전자 애플리케이션에 걸쳐 고객들에게 기여하는 세계적인 반도체 회사 ST마이크로일렉트로닉스(STMicroelectronics, 이하 ST)가 고성능 마이크로컨트롤러 STM32F722/723[1]의 원활한 활용을 돕기 위해 STM32F723의 독보적인 고속 USB PHY 액세스가 가능한 차세대 디스커버리 키트와 STM32F722 지원 누클레오(Nucleo) 보드 누클레오-144를 새롭게 선보였다. 팔로알토 네트웍스, 차세대 보안 플랫폼의 새로운 기준 제시글로벌 차세대 보안 분야 선도 기업인 팔로알토 네트웍스(Palo Alto Networks®, https://www.paloaltonetworks.com)는 오늘, 클라우드 보안을 강화하고 선제 방어 전략을 위한 70여 가지의 새로운 기능과 계정 탈취 방지 기능 추가된 차세대 보안 플랫폼 운영체제 최신 버전 PAN-OS 8.0을 출시했다고 밝혔다.
팔로알토 네트웍스, 차세대 보안 플랫폼의 새로운 기준 제시글로벌 차세대 보안 분야 선도 기업인 팔로알토 네트웍스(Palo Alto Networks®, https://www.paloaltonetworks.com)는 오늘, 클라우드 보안을 강화하고 선제 방어 전략을 위한 70여 가지의 새로운 기능과 계정 탈취 방지 기능 추가된 차세대 보안 플랫폼 운영체제 최신 버전 PAN-OS 8.0을 출시했다고 밝혔다.  리니어 테크놀로지, 레일투레일 연산증폭기 출시리니어 테크놀로지 코리아(대표 홍사곽)는 저잡음, 정밀 동작 앰프인 싱글/듀얼/쿼드 연산증폭기(제품명: LTC6261/62/63)를 출시한다고 밝혔다.
리니어 테크놀로지, 레일투레일 연산증폭기 출시리니어 테크놀로지 코리아(대표 홍사곽)는 저잡음, 정밀 동작 앰프인 싱글/듀얼/쿼드 연산증폭기(제품명: LTC6261/62/63)를 출시한다고 밝혔다. - NXP, 세계 5대 자동차 제조사에 NFC 기술 제공 NFC(Near Field Communications: 근거리 무선통신)의 공동 발명가이자 자동차 반도체 솔루션 분야의 글로벌 선두기업인 NXP 반도체(NASDAQ:NXPI)는 선두 5대 자동차 제조사가 향후 차량에 NXP의 NFC 디바이스를 장착하게 될 것이라고 모바일 월드 콩그레스2017(Mobile World Congress 2017)에서 발표했다.
 마이크로칩, 자동 튜닝 및 자가-시운전이 가능한 첨단 모터 컨트롤 툴 출시마이크로컨트롤러, 혼합 신호, 아날로그 반도체 및 플래시-IP 솔루션 분야의 세계적인 리더인 마이크로칩테크놀로지(북아시아 총괄 및 한국 대표: 한병돈)는 자사의 MPLAB® X IDE(Integrated Development Environment)용으로 자동 튜닝과 자가-시운전 성능을 갖춘 첨단 모터 컨트롤 소프트웨어 플러그인 툴을 새롭게 출시한다고 밝혔다.
마이크로칩, 자동 튜닝 및 자가-시운전이 가능한 첨단 모터 컨트롤 툴 출시마이크로컨트롤러, 혼합 신호, 아날로그 반도체 및 플래시-IP 솔루션 분야의 세계적인 리더인 마이크로칩테크놀로지(북아시아 총괄 및 한국 대표: 한병돈)는 자사의 MPLAB® X IDE(Integrated Development Environment)용으로 자동 튜닝과 자가-시운전 성능을 갖춘 첨단 모터 컨트롤 소프트웨어 플러그인 툴을 새롭게 출시한다고 밝혔다.  아나로그디바이스, A2B 트랜시버 제품군 추가로 버스 대역 활용도 향상신호 처리 애플리케이션용 고성능 반도체 분야 글로벌 선도 기업인 아나로그디바이스(www.analog.com)가 성능이 개선된 자동차 오디오 버스(Automotive Audio Bus, A2B®) 트랜시버 3종을 출시했다. 이번에 출시된 제품은 오디오와 제어 데이터, 클록, 전력을 하나의 UTP(unshielded twisted-pair) 케이블에서 분배하는 데 사용된다.
아나로그디바이스, A2B 트랜시버 제품군 추가로 버스 대역 활용도 향상신호 처리 애플리케이션용 고성능 반도체 분야 글로벌 선도 기업인 아나로그디바이스(www.analog.com)가 성능이 개선된 자동차 오디오 버스(Automotive Audio Bus, A2B®) 트랜시버 3종을 출시했다. 이번에 출시된 제품은 오디오와 제어 데이터, 클록, 전력을 하나의 UTP(unshielded twisted-pair) 케이블에서 분배하는 데 사용된다.  NI, ‘오토모티브 테스팅 엑스포 2017’에서 자율주행차를 위한 스마트 테스트 기술 공개내쇼날인스트루먼트(ni.com/korea, 이하 NI)는 오는 3월 6일부터 8일까지 사흘간 서울 킨텍스(KINTEX)에서 개최되는 ‘오토모티브 테스팅 엑스포 2017(Automotive Testing Expo 2017)’에 참가하여 자율주행차를 위한 스마트 테스트 솔루션과 데모를 선보인다고 밝혔다.
NI, ‘오토모티브 테스팅 엑스포 2017’에서 자율주행차를 위한 스마트 테스트 기술 공개내쇼날인스트루먼트(ni.com/korea, 이하 NI)는 오는 3월 6일부터 8일까지 사흘간 서울 킨텍스(KINTEX)에서 개최되는 ‘오토모티브 테스팅 엑스포 2017(Automotive Testing Expo 2017)’에 참가하여 자율주행차를 위한 스마트 테스트 솔루션과 데모를 선보인다고 밝혔다. 텔릿, MWC에서 IoT의 비즈니스 가치 입증IoT 모듈 및 플랫폼 서비스 전문기업인 텔릿(대표 데릭 상, www.telit.com)은 MWC(Mobile World Congress)에서 커넥티드 경험(Connected Experience)을 라이브로 선보인다. 세계에서 가장 큰 규모의 모바일 기술 관련 행사인 MWC는 2월 27일부터 3월 2일까지 스페인 바르셀로나에서 개최된다.
텔릿, MWC에서 IoT의 비즈니스 가치 입증IoT 모듈 및 플랫폼 서비스 전문기업인 텔릿(대표 데릭 상, www.telit.com)은 MWC(Mobile World Congress)에서 커넥티드 경험(Connected Experience)을 라이브로 선보인다. 세계에서 가장 큰 규모의 모바일 기술 관련 행사인 MWC는 2월 27일부터 3월 2일까지 스페인 바르셀로나에서 개최된다.- ST마이크로일렉트로닉스와 유사운드, 탁월한 음질의 MEMS 스피커 세계 최초 개발에 협력 다양한 전자 애플리케이션에 걸쳐 고객들에게 기여하는 세계적인 반도체 회사인 ST마이크로일렉트로닉스(STMicroelectronics, 이하 ST)와 빠르게 성장 중인 혁신적인 오디오 전문기업인 유사운드(USound GmbH)가 세계 최초로 휴대형 기기 스마트 오디오 시스템용 소형 압전 MEMS(Micro-Electro-Mechanical Systems) 액추에이터의 산업화 및 생산 관련 협력 체결을 발표했다.
 리니어 테크놀로지, 절연형 애니사이드 스위치 컨트롤러 출시리니어 테크놀로지 코리아(대표 홍사곽)은 최대 1000V까지 고전압 DC 전원공급장치를 보호하고 모니터링 할 수 있는 올인원 타입의 절연형 애니사이드(Anyside™) 스위치 컨트롤러인 LTM9100 µModule®(마이크로모듈)을 출시했다고 밝혔다.
리니어 테크놀로지, 절연형 애니사이드 스위치 컨트롤러 출시리니어 테크놀로지 코리아(대표 홍사곽)은 최대 1000V까지 고전압 DC 전원공급장치를 보호하고 모니터링 할 수 있는 올인원 타입의 절연형 애니사이드(Anyside™) 스위치 컨트롤러인 LTM9100 µModule®(마이크로모듈)을 출시했다고 밝혔다.- NXP, ‘커넥티드 카’ 보안 문제 공동 대처 위해 Auto-ISAC 합류세계 최대 자동차 반도체 공급업체이자, 자동차 사이버보안 선두기업인 NXP반도체(NASDAQ:NXPI)는 자동차 정보공유분석 센터(Auto-ISAC: Automotive Information Sharing and Analysis Center)에 합류했다고 발표했다.
 마우저, 이미지로 제품 검색하는 탭 제공반도체 및 전자부품 신제품 소개(NPI) 유통기업인 마우저 일렉트로닉스는 자사의 업계 선도적인 웹사이트 Mouser.com에서 원하는 제품을 이미지로 검색 및 선택할 수 있는 획기적인 기능을 제공한다고 밝혔다. 마우저는 고객들이 보다 쉽게 제품 검색을 하고 이용할 수 있도록 지속적으로 웹사이트를 개선하기 위해 노력하고 있다.
마우저, 이미지로 제품 검색하는 탭 제공반도체 및 전자부품 신제품 소개(NPI) 유통기업인 마우저 일렉트로닉스는 자사의 업계 선도적인 웹사이트 Mouser.com에서 원하는 제품을 이미지로 검색 및 선택할 수 있는 획기적인 기능을 제공한다고 밝혔다. 마우저는 고객들이 보다 쉽게 제품 검색을 하고 이용할 수 있도록 지속적으로 웹사이트를 개선하기 위해 노력하고 있다.
 오직 나 만을 위한 ‘맞춤형’ 제품을 위한 추천 아이템 3종
오직 나 만을 위한 ‘맞춤형’ 제품을 위한 추천 아이템 3종 KT, ‘퀀텀 코리아 2024’에서 순수 국내 기술로 개발한 양자암호통신기술 선보인다
KT, ‘퀀텀 코리아 2024’에서 순수 국내 기술로 개발한 양자암호통신기술 선보인다 코보, 첨단 레이더 애플리케이션을 위한 RF 멀티칩 모듈 출시
코보, 첨단 레이더 애플리케이션을 위한 RF 멀티칩 모듈 출시 맨디언트, 2024 M-트렌드 보고서- 공격 지속시간 사상 최저치 기록
맨디언트, 2024 M-트렌드 보고서- 공격 지속시간 사상 최저치 기록 유블럭스, 새로운 초소형 LTE Cat 1bis 셀룰러 모듈로 글로벌 연결성 강화
유블럭스, 새로운 초소형 LTE Cat 1bis 셀룰러 모듈로 글로벌 연결성 강화
- ST, 대규모 IoT 기기의 혁신적 관리 위한 새로운 표준 지원하는 임베디드 SIM 출시
- 바이코, 전력전자학술대회에서 전력 설계를 혁신하는 고밀도 전력모듈 발표
- 헥사곤 ‘스마트 스캔 VR800 3D’ 스캐너, 레드닷 디자인 어워드 제품 디자인 부문 수상
- 포티넷, ‘2024 글로벌 OT 운영기술 및 사이버 보안 현황 보고서' 발표
- 어플라이드 머티어리얼즈 코리아, 초록우산어린이재단과 지역사회 교육 지원
- KT, 100 기가 전국 전송망 구축으로 전용회선 및 유무선 안정성 향상
그래픽 / 영상
 헤드셋 매출의 향방, 하락세는 지속할 것인가?
헤드셋 매출의 향방, 하락세는 지속할 것인가?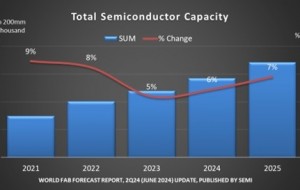 한국 반도체 생산능력, 올해 첫 5백만장 넘어선다
한국 반도체 생산능력, 올해 첫 5백만장 넘어선다 실리콘 카바이드로 배터리 에너지 저장 시스템 향상
실리콘 카바이드로 배터리 에너지 저장 시스템 향상많이 본 뉴스
 마이크로칩, 군사용 표준 ELDRS 인증 획득한 양극 접합 트랜지스터 출시
마이크로칩, 군사용 표준 ELDRS 인증 획득한 양극 접합 트랜지스터 출시 엔비디아, AI 어시스턴트 통한 지포스 RTX AI PC 구현
엔비디아, AI 어시스턴트 통한 지포스 RTX AI PC 구현 로데슈바르즈, 최대 2GHz 대역을 지원하는 세계 최소형 오실로스코프 ‘MXO 5C’ 시리즈 출시
로데슈바르즈, 최대 2GHz 대역을 지원하는 세계 최소형 오실로스코프 ‘MXO 5C’ 시리즈 출시 KT, 안전 플랫폼 ‘올 인 세이프티’ 도입으로 AI 기반 안전 관리 기능 강화
KT, 안전 플랫폼 ‘올 인 세이프티’ 도입으로 AI 기반 안전 관리 기능 강화 지멘스, Simcenter X로 시뮬레이션 접근성 향상
지멘스, Simcenter X로 시뮬레이션 접근성 향상 CML, 상업용 위성통신 단말기의 비용 효율적인 개발을 위한 Ka 대역 GaN 전력 증폭기 출시
CML, 상업용 위성통신 단말기의 비용 효율적인 개발을 위한 Ka 대역 GaN 전력 증폭기 출시 로지텍, 디지털 문구 콘텐츠 플랫폼 위버딩과 한정판 디지털 콜라보 굿즈 출시
로지텍, 디지털 문구 콘텐츠 플랫폼 위버딩과 한정판 디지털 콜라보 굿즈 출시 사피온 AI반도체 ‘X330’, 슈퍼마이크로 서버 적격성 평가 완료
사피온 AI반도체 ‘X330’, 슈퍼마이크로 서버 적격성 평가 완료 인텔, 연례 기업 사회적 책임 보고서 발표
인텔, 연례 기업 사회적 책임 보고서 발표 Smart-Ex 03—5G 스마트폰, 스페인 에너지 파크의 통신 디지털화 지원
Smart-Ex 03—5G 스마트폰, 스페인 에너지 파크의 통신 디지털화 지원