글 / 사벤 이펙(Sarven Ipek) 마케팅 매니저(LiDAR 담당), 밥 스캐널(Bob Scannell) 제품 마케팅 매니저(Inertial Measurement Units 담당), 제럴드 돕프(Gerald Dopf) 선임 사업개발 매니저(레이더 담당) / 아나로그디바이스(Analog Devices, Inc.)

청바지와 증기 엔진을 발명한 1차 산업혁명에 이어 대량 제조의 2차 산업혁명을 거쳐서, 인류는 끊임없이 새로운 기술들을 도입하면서 진보해 왔다.
오늘날에는 인더스트리4.0과 자율 시스템이 가속화하면서 새로운 산업혁명이 시작되고 있다. 자원과 인력을 더 효율적으로 활용할 수 있도록 기술들이 계속해서 빠르게 진화하고 있다.
제조, 광산, 농업, 물류를 비롯한 다양한 분야로 자동화 및 자율화 로봇, 자동차, 드론 같은 것들을 도입함으로써 새로운 산업혁명을 위한 토대를 놓고 있다.
자율 애플리케이션에 요구되는 시스템 성능을 달성하기 위해서는 장비가 주변 환경을 인지하고 이동할 수 있어야 한다. 이를 위해서는 다양한 센서들을 융합하고 인공지능(AI)나 머신 러닝 기반 알고리즘을 사용해서 분석해야 한다. 여러 센서 기술들을 융합함으로써 안전성, 효율, 비용, 유연성을 향상시킬 수 있다.
자율 시스템을 위해서는 여러 가지 센서들로부터 수집된 고충실도 데이터를 집중적으로 필요로 하며 이것을 AI와 알고리즘으로 제공해야 한다. 현재 널리 사용되는 센서들로는 레이더, LiDAR, 비전, 초음파, 관성 센서를 들 수 있다. 아래 표는 각 인지 센서의 장단점을 요약한 것으로서, 각각의 센서들을 보완하기 위해서 시스템으로 다중의 센서가 필요하다는 것을 알 수 있다.
센서 유형 |
장점 | 단점 |
적합한 용도 |
비전 |
매우 높은 해상도 컬러 |
야간 악전후 추정거리 |
3D 맵핑(15m 이상) 레벨 1 등급 소형 장애물 감지 |
LiDAR |
높은 해상도 측정된 거리 |
악천후 |
3D 맵핑(15m 이상) 레벨 1 등급 소형 장애물 감지 |
레이더 |
대부분의 기상조건에 적합 측정된 거리 측정된 속도 |
낮은 해상도 |
물체 감지 및 추적 |
초음파 |
모든 기상조건에 적합 측정된 거리 가장 저렴한 가격대 |
짧은 거리 낮은 해상도 느린 응답 |
저속, 근거리 감지 |
인더스트리 4.0을 위해서는 다양한 과제들을 해결해야 한다. 열악한 환경에서 자율적으로 움직이는 기계 장비(로봇, 코봇 등)를 위해서는 주변의 물체를 감지하기 위해 크기는 작으면서 정확한 레이더 기술이 필요하다. 효율, 생산성, 안전성을 높이기 위해서는 주변의 물체를 감지하고 식별할 수 있어야 한다.
최근에 RF 트랜시버 IC 기술이 발전하면서 레이더가 인지 애플리케이션에서 중요한 센서 기술로 빠르게 자리잡고 있다. 이러한 예로서 77GHz 완벽히 통합된 완전 디지털 트랜시버 MMIC를 들 수 있다. 이 제품은 고속 고선형성 FMCW 처프(chirp)에 높은 출력 전력과 저잡음 송신 및 수신 채널이 특징이며, MIMO 안테나 어레이와 결합해서 고성능 고해상도 레이더 시스템을 경제적으로 구현할 수 있다. 레이더 기반 디지털 빔 포밍 기술은 열악한 환경 조건에서 다양한 물체들에 대해서 시선 속도(radial velocity), 각도, 거리를 감지할 수 있다. 이러한 기능은 역동적인 환경에서 로봇, 코봇, AGV와 안전하고도 효율적으로 상호작용하기 위해서 필요하다.
산업용 환경에서 자율 시스템은 물체를 안전하게 회피하는 것도 중요하지만 물체를 식별하고 집을 수도 있어야 한다. LiDAR는 물체를 감지하고 분류하는 능력이 뛰어나므로 이러한 동작들을 수행하는데 필요한 정밀성을 제공한다.
테라헤르츠 주파수 대역에서 동작하는 LiDAR 시스템은 미세한 각 분해능을 달성하고, 이것은 높은 해상도의 깊이 맵(depth map)으로 이어진다. 이러한 고해상도 깊이 맵에 비전, IMU(Inertial Measurement Unit), 레이더 정보를 결합해서 물체를 식별하고 신뢰성 있게 의사결정을 할 수 있다. LiDAR 시스템은 햇빛이 밝은 야외 같이 역동적인 환경에서 작동할 수 있도록 설계되었다. LiDAR는 900nm대와 1500nm대 파장의 협폭 펄스를 사용하고 높은 전력으로 구동되기 때문에 이처럼 까다로운 조건에서도 더 멀리 감지할 수 있다. 협폭 펄스는 여러 물체들을 감지할 수 있도록 보다 미세한 깊이 분해능이 가능하며, 900nm대와 1500nm대의 적외선 광은 태양 복사가 덜하다.
LiDAR 시스템 도입이 더욱 확대되려면 여러 과제들이 해결돼야 한다. 여기에는 복잡하고 비용이 많이 드는 신호 체인, 광학 설계, 시스템 테스트와 캘리브레이션 등이 포함된다. 이러한 과제들을 해결하기 위해 신호 체인을 통합하고 복잡성, 크기, 전력 소모, 전반적인 유지 비용을 줄이기 위한 개발들이 진행되고 있다.
내비게이션 센싱 – 기계에 감정을 제공
산업용 기계류에서 센서의 사용이 폭발적으로 늘어나고 이들로부터 수집되는 데이터가 증가하면서, 이들의 위치와 상대적인 동작 역시 중요해지고 있다. 자율이라는 용어는 이동성과도 관련된 것으로서, 장비의 위치를 특정하거나 이동 방향을 안내하거나 운전대를 정밀하게 조절하는 것이 핵심 기술이다. 이러한 동작들을 정밀하게 감지할 수 있으면 보다 난이도가 높고 중요하면서 안전성과 신뢰성도 함께 요구되는 애플리케이션에 자율 주행 기술을 사용할 수 있게 된다. 예를 들어서 스마트 농장은 농작물 관리의 효율을 끊임없이 향상시키기를 원하는데, 장비의 위치를 센티미터 이내의 정확도로 특정할 수 있다면 투입물은 절약하면서 산출을 극대화할 수 있다.

자율 내비게이션을 위한 한 가지 방법은 GNSS 위치 서비스를 사용하는 것이다. 그런데 GNSS는 거의 어디서나 사용할 수 있기는 하나 신호 중단에 취약하다. 완전 자율을 위해서는 신호 중단이나 장애가 없이 동작해야 한다. 이러한 경우, 관성 센서를 사용해서 모션 측정을 보완할 수 있다. 모든 3개 축에 직선 및 회전 센서들을 결합해서 6자유도(degrees of freedom)의 IMU를 달성할 수 있다. 또한 상대 고도, 방향, 속도를 제공할 수 있도록 IMU의 출력을 추가적으로 처리할 수 있는데, 이를 추측 항법 유도(dead-reckoning guidance)라고 한다.
센티미터 대의 포지셔닝 정확도를 위해서는 특수한 관성 센서가 필요하다. 컨수머용의 IMU는 시간이 지남에 따라 출력이 편차를 일으킬 수 있다. 그러면 ‘원하는’ 동작과 진동이나 축을 교차하는 외란 같은 오차 요인을 구분하지 못한다. 이에 반해 고성능 관성 센서는 안정성이 시간당 1로 우수하고, 특수한 센서 아키텍처를 사용해서 선형 중력 오차를 제거하고, 온도와 정렬 불량을 보정하도록 설계되었다. GPS 및 인지 센서와 비교해서 이러한 정밀 모션 캡처 성능을 10배 ~ 100배까지 더 향상할 수 있어 인간의 모션 감지 능력을 대체할 수 있다.
새로운 산업혁명이 가속화하고 있으며, 이를 뒷받침할 자율화를 실현하기 위한 관련 센싱 기술들이 빠르게 진화하고 있다. 레이더, LiDAR, 카메라를 사용하면 근거리와 원거리에서 물체를 정확하게 감지하고 분류할 수 있다. 그럼으로써 산업용 자율화 장비들이 사람처럼 인지하고 이동할 수 있게 할 수 있다. 또한 자율 애플리케이션을 위한 감정(gut feel)이나 추측 항법 기능을 제공하려면 관성 센서가 매우 중요하다. 이러한 센서들이 정밀할수록 인공 지능에 더 높은 품질의 데이터를 제공할 수 있으며, 그럼으로써 더 안전하면서 더 효율적인 애플리케이션을 달성할 수 있다.
관련 첨부파일 : 산업용 자율장비 혁신의 핵심, 센서 기술.pdf
저작권©올포칩 미디어. 무단전재 및 재배포를 금지합니다.
 eGaN FET 및 IC를 이용한 비용 효율적인 고성능 ToF 라이다 시스템 구현GaN 전력 트랜지스터 및 IC의 탁월한 성능은 혁신적인 레이저 드라이버 성능을 지원한다. 몇 제곱 밀리미터에 불과한 크기로 한 자리수 나노초와 높은 전류의 펄스를 생성함으로써 수백 와트의 놀라운 성능을 제공한다. 이는 저렴하면서도 높은 성능의 라이다를 구현할 수 있는 주요 요인 중 하나이다. 따라서 GaN 기술을 사용하면, 높은 정확도가 핵심인 라이다 애플리케이션을 보다 확장시킬 수 있다.
eGaN FET 및 IC를 이용한 비용 효율적인 고성능 ToF 라이다 시스템 구현GaN 전력 트랜지스터 및 IC의 탁월한 성능은 혁신적인 레이저 드라이버 성능을 지원한다. 몇 제곱 밀리미터에 불과한 크기로 한 자리수 나노초와 높은 전류의 펄스를 생성함으로써 수백 와트의 놀라운 성능을 제공한다. 이는 저렴하면서도 높은 성능의 라이다를 구현할 수 있는 주요 요인 중 하나이다. 따라서 GaN 기술을 사용하면, 높은 정확도가 핵심인 라이다 애플리케이션을 보다 확장시킬 수 있다. 옵토커플러가 필요 없는 600V 입력 절연형 플라이백 컨트롤러의 전원 전압을 800V로 확장기존의 절연형 고전압 플라이백 컨버터는 옵토커플러를 사용해 이차측 레퍼런스 회로에서 일차측으로 레귤레이션 정보를 전달하여 정밀한 레귤레이션을 달성한다. 그런데 문제는, 옵토커플러로 인해 절연형 디자인에서 복잡성을 상당히 높인다는 것이다. 옵토커플러와 관련해서 전달 지연, 노후화, 이득 차이 같은 문제들이 있을 수 있으며, 이러한 문제들 모두가 전원 루프 보정을 복잡하게 하고 신뢰성을 낮출 수 있다. 그런데다가 스타트업 시에 IC를 파워업 하기 위해서 블리더 저항이나 고전압 스타트업 회로가 필요하다. 또한 스타트업 부품들로 고전압 MOSFET을 추가하지 않으면 블리더 저항이 원치 않는 전력 손실을 일으키는 요인이 될 수 있다.
옵토커플러가 필요 없는 600V 입력 절연형 플라이백 컨트롤러의 전원 전압을 800V로 확장기존의 절연형 고전압 플라이백 컨버터는 옵토커플러를 사용해 이차측 레퍼런스 회로에서 일차측으로 레귤레이션 정보를 전달하여 정밀한 레귤레이션을 달성한다. 그런데 문제는, 옵토커플러로 인해 절연형 디자인에서 복잡성을 상당히 높인다는 것이다. 옵토커플러와 관련해서 전달 지연, 노후화, 이득 차이 같은 문제들이 있을 수 있으며, 이러한 문제들 모두가 전원 루프 보정을 복잡하게 하고 신뢰성을 낮출 수 있다. 그런데다가 스타트업 시에 IC를 파워업 하기 위해서 블리더 저항이나 고전압 스타트업 회로가 필요하다. 또한 스타트업 부품들로 고전압 MOSFET을 추가하지 않으면 블리더 저항이 원치 않는 전력 손실을 일으키는 요인이 될 수 있다. 미세한 차이까지 감지하는 정밀함: 기계 건전성 감지오늘날에는 대규모로 기계 건전성을 유지하기가 쉽지 않고, 사람이 일일이 주기적으로 유지보수를 하기는 비효율적이며 비용도 많이 든다. 오토센스 기술을 활용하면 기계에서 소리나 진동이 변화하는 것을 감지 및 포착할 수 있으며, 이 데이터를 분석해서 기계 건전성에 대한 통찰을 얻을 수 있다. 따라서 고객들은 시스템을 네트워크에 연결하지 않고도, 이처럼 포착하기 어려운 신호들을 측정하고 이로부터 조치 가능한 정보를 도출할 수 있다.
미세한 차이까지 감지하는 정밀함: 기계 건전성 감지오늘날에는 대규모로 기계 건전성을 유지하기가 쉽지 않고, 사람이 일일이 주기적으로 유지보수를 하기는 비효율적이며 비용도 많이 든다. 오토센스 기술을 활용하면 기계에서 소리나 진동이 변화하는 것을 감지 및 포착할 수 있으며, 이 데이터를 분석해서 기계 건전성에 대한 통찰을 얻을 수 있다. 따라서 고객들은 시스템을 네트워크에 연결하지 않고도, 이처럼 포착하기 어려운 신호들을 측정하고 이로부터 조치 가능한 정보를 도출할 수 있다. HDL 최적화 및 완벽한 공급망을 제공하는 FPGA용 CPU 소프트 IPRISC-V 개방형 ISA는 개별 애플리케이션을 가장 효율적으로 실행할 수 있도록 명령어 집합을 최적화함으로써 항공우주 및 방위 분야 개발자들에게 전력 소비와 BOM 비용, 보드 면적 최소화 등의 문제 해결 솔루션을 제공한다.
HDL 최적화 및 완벽한 공급망을 제공하는 FPGA용 CPU 소프트 IPRISC-V 개방형 ISA는 개별 애플리케이션을 가장 효율적으로 실행할 수 있도록 명령어 집합을 최적화함으로써 항공우주 및 방위 분야 개발자들에게 전력 소비와 BOM 비용, 보드 면적 최소화 등의 문제 해결 솔루션을 제공한다. 최적의 전력전송 및 안전기능을 제공하는 100mA 무선 충전 솔루션소형 휴대 디바이스나 웨어러블 디바이스로 무선 충전이 갈수록 인기를 끌고 있다. 여기에는 그럴 만한 이유가 있다. 무선 충전을 사용함으로써 커넥터와 포트를 노출시키지 않고 디바이스를 더 견고하게 할 수 있으며 최종 사용자들을 위해서 편의성을 크게 높일 수 있다. 보청기와 같은 디바이스들에서 통상적으로 제기되는 공간 제약을 극복할 수 있는 점으로서, LTC4124는 무선 전력 관리기 기능을 통합함으로써 무선 공진 탱크로부터 AC 전압을 레귤레이트 된 DC 전압으로 변환할 수 있다.
최적의 전력전송 및 안전기능을 제공하는 100mA 무선 충전 솔루션소형 휴대 디바이스나 웨어러블 디바이스로 무선 충전이 갈수록 인기를 끌고 있다. 여기에는 그럴 만한 이유가 있다. 무선 충전을 사용함으로써 커넥터와 포트를 노출시키지 않고 디바이스를 더 견고하게 할 수 있으며 최종 사용자들을 위해서 편의성을 크게 높일 수 있다. 보청기와 같은 디바이스들에서 통상적으로 제기되는 공간 제약을 극복할 수 있는 점으로서, LTC4124는 무선 전력 관리기 기능을 통합함으로써 무선 공진 탱크로부터 AC 전압을 레귤레이트 된 DC 전압으로 변환할 수 있다. IoT를 넘어 자동차까지… 엣지 컴퓨팅 설계의 중요성엣지 컴퓨팅은 가정 및 기업용 애플리케이션부터 네트워크로 연결된 자동차에 이르기까지 IoT 기술 전반에 널리 사용된다. 엣지 컴퓨팅은 일반 컴퓨팅 대비 더 많은 데이터를 생성하므로 이를 구현하려면 최적의 사이버 보안 성능과 가장 높은 수준의 기능 보안성을 갖춘 강력한 네트워크 엣지 컴퓨팅 플랫폼이 필요하다.
IoT를 넘어 자동차까지… 엣지 컴퓨팅 설계의 중요성엣지 컴퓨팅은 가정 및 기업용 애플리케이션부터 네트워크로 연결된 자동차에 이르기까지 IoT 기술 전반에 널리 사용된다. 엣지 컴퓨팅은 일반 컴퓨팅 대비 더 많은 데이터를 생성하므로 이를 구현하려면 최적의 사이버 보안 성능과 가장 높은 수준의 기능 보안성을 갖춘 강력한 네트워크 엣지 컴퓨팅 플랫폼이 필요하다. 로옴, 노이즈 필터링 기능 내장한 가속도 센서 개발 - 산업용 기기의 상태 모니터링 지원최근 대부분의 공장에서 고효율화와 더불어 인력 사용을 줄이는 추세가 있다. 또한 산업용 기기의 결함이 현저하게 나타나기 전에, 이상 상태를 미리 검지하는 예측유지보수 개념이 확대되고 있다. 이에 따라 머신 상태 모니터링이 주목을 받게 되었으며, 상태 검지를 위한 디바이스로서 센서의 중요도는 나날이 증대하고 있다. 카이오닉스는 지금까지 모바일 기기용 소형 가속도 센서를 중심으로 개발해 왔지만 산업용 기기를 위한 라인업을 확충함으로써 폭넓은 요구에 대응해 나가고 있다.
로옴, 노이즈 필터링 기능 내장한 가속도 센서 개발 - 산업용 기기의 상태 모니터링 지원최근 대부분의 공장에서 고효율화와 더불어 인력 사용을 줄이는 추세가 있다. 또한 산업용 기기의 결함이 현저하게 나타나기 전에, 이상 상태를 미리 검지하는 예측유지보수 개념이 확대되고 있다. 이에 따라 머신 상태 모니터링이 주목을 받게 되었으며, 상태 검지를 위한 디바이스로서 센서의 중요도는 나날이 증대하고 있다. 카이오닉스는 지금까지 모바일 기기용 소형 가속도 센서를 중심으로 개발해 왔지만 산업용 기기를 위한 라인업을 확충함으로써 폭넓은 요구에 대응해 나가고 있다. 차세대 메모리 반도체 개발을 지원하는 ‘통합 공정 모니터링’M램(Magnetic RAM), Re램(Resistive RAM), PC램(Phase Change RAM) 3가지 메모리는 IoT 기기와 클라우드 컴퓨팅 서비스에 성능, 전력 소모, 비용 측면에서 혜택을 제공하는 대표적인 차세대 메모리로 꼽히지만 공정 기술과 양산에 혁신이 요구되는 정교한 신소재를 기반으로 한다. 차세대 메모리 구현을 위한 핵심 필름은 얇고 변화에 민감해 계측이 매우 중요하다.
차세대 메모리 반도체 개발을 지원하는 ‘통합 공정 모니터링’M램(Magnetic RAM), Re램(Resistive RAM), PC램(Phase Change RAM) 3가지 메모리는 IoT 기기와 클라우드 컴퓨팅 서비스에 성능, 전력 소모, 비용 측면에서 혜택을 제공하는 대표적인 차세대 메모리로 꼽히지만 공정 기술과 양산에 혁신이 요구되는 정교한 신소재를 기반으로 한다. 차세대 메모리 구현을 위한 핵심 필름은 얇고 변화에 민감해 계측이 매우 중요하다. 혁신적인 타이밍을 제공하는 오토모티브 인증 MEMS 오실레이터기존의 안정된 기술을 보다 현대적인 접근방식으로 대체할 경우 많은 부분에서 획기적인 기능 향상을 가져올 수 있다. 반도체 디바이스의 경우, 과거 50여 년간 소형화, 고속화, 저가격화(및/또는 성능 개선, 신뢰성 향상 등)의 방향으로 꾸준히 진전되어 왔다. 타이밍 요건이 핵심인 최근 자동차 애플리케이션 디지털 회로에서는 과거 어느 때보다 MEMS 오실레이터의 필요성이 대두되고 있다. 이 글에서는 다양한 오토모티브 애플리케이션에서 새롭게 부상하는 수요 및 필요성에 대해 논의하고 MEMS 오실레이터와 크리스탈 오실레이터의 차이점을 설명하고자 한다.
혁신적인 타이밍을 제공하는 오토모티브 인증 MEMS 오실레이터기존의 안정된 기술을 보다 현대적인 접근방식으로 대체할 경우 많은 부분에서 획기적인 기능 향상을 가져올 수 있다. 반도체 디바이스의 경우, 과거 50여 년간 소형화, 고속화, 저가격화(및/또는 성능 개선, 신뢰성 향상 등)의 방향으로 꾸준히 진전되어 왔다. 타이밍 요건이 핵심인 최근 자동차 애플리케이션 디지털 회로에서는 과거 어느 때보다 MEMS 오실레이터의 필요성이 대두되고 있다. 이 글에서는 다양한 오토모티브 애플리케이션에서 새롭게 부상하는 수요 및 필요성에 대해 논의하고 MEMS 오실레이터와 크리스탈 오실레이터의 차이점을 설명하고자 한다. 예민한 전자 신호 입력의 과전압 보호산업용 환경에서 동작하는 전자 시스템이 보다 견고하게 설계돼야 한다는 요구가 점점 더 늘어남에 따라 개발자들의 부담은 더욱 커지고 있다. 시스템을 과전압으로부터 보호하기 위해서는 추가적인 부품들이 필요한데, 이러한 부품들은 신호에 영향을 미치기도 하고, 심하면 신호를 손상시킬 수도 있다. 더구나 이러한 부품들을 사용하면 추가 비용도 발생하고 공간 제약도 더 커진다. 따라서 이러한 보호 회로를 설계할 때 기존의 솔루션은 시스템 정확도와 보호 수준 사이에서 절충을 해야 했다.
예민한 전자 신호 입력의 과전압 보호산업용 환경에서 동작하는 전자 시스템이 보다 견고하게 설계돼야 한다는 요구가 점점 더 늘어남에 따라 개발자들의 부담은 더욱 커지고 있다. 시스템을 과전압으로부터 보호하기 위해서는 추가적인 부품들이 필요한데, 이러한 부품들은 신호에 영향을 미치기도 하고, 심하면 신호를 손상시킬 수도 있다. 더구나 이러한 부품들을 사용하면 추가 비용도 발생하고 공간 제약도 더 커진다. 따라서 이러한 보호 회로를 설계할 때 기존의 솔루션은 시스템 정확도와 보호 수준 사이에서 절충을 해야 했다. IoT와 클라우드 컴퓨팅을 위한 메모리 신기술 개발 가속화AI 시대는 메모리 기술의 혁신을 필요로 한다. 혁신의 핵심은 고속 메모리의 상당 수를 컴퓨팅 리소스에 더 가까이 위치시켜 성능과 전력 효율을 끌어올리는 것이다. 인접성을 향상시키면 데이터 저장 공간과 연산 엔진 사이의 공간이 줄어 성능 병목 현상이 해결되고 전력 소비가 줄어든다.
IoT와 클라우드 컴퓨팅을 위한 메모리 신기술 개발 가속화AI 시대는 메모리 기술의 혁신을 필요로 한다. 혁신의 핵심은 고속 메모리의 상당 수를 컴퓨팅 리소스에 더 가까이 위치시켜 성능과 전력 효율을 끌어올리는 것이다. 인접성을 향상시키면 데이터 저장 공간과 연산 엔진 사이의 공간이 줄어 성능 병목 현상이 해결되고 전력 소비가 줄어든다. 저잡음 전압 생성을 위한 설계 방법론선형 레귤레이터는 스위칭 레귤레이터에 의해 생성된 전압을 필터링하는데 탁월하다. 스위칭 레귤레이터는 항상 일정한 양의 출력 전압 리플을 갖는다. 매우 작은 신호를 처리하는 많은 애플리케이션에서 이러한 리플은 간섭을 일으킬 수 있다. 보통 수동 부품을 사용하여 스위칭 레귤레이터의 출력 전압을 필터링하지만, LC 필터와 같은 수동 필터에는 몇 가지 단점이 있다. LC 필터는 필요한 컷오프 주파수에 따라 때때로 공간 요구사항이 상당히 클 수 있고 인덕터는 비용이 많이 든다.
저잡음 전압 생성을 위한 설계 방법론선형 레귤레이터는 스위칭 레귤레이터에 의해 생성된 전압을 필터링하는데 탁월하다. 스위칭 레귤레이터는 항상 일정한 양의 출력 전압 리플을 갖는다. 매우 작은 신호를 처리하는 많은 애플리케이션에서 이러한 리플은 간섭을 일으킬 수 있다. 보통 수동 부품을 사용하여 스위칭 레귤레이터의 출력 전압을 필터링하지만, LC 필터와 같은 수동 필터에는 몇 가지 단점이 있다. LC 필터는 필요한 컷오프 주파수에 따라 때때로 공간 요구사항이 상당히 클 수 있고 인덕터는 비용이 많이 든다. 시스템의 안전 및 성능을 위한 개방형 프레임 및 U-채널 PSU 설치 방법론대부분의 AC/DC 전원 공급 장치(PSU)는 개방 프레임 형식으로 제공되므로 완전히 밀폐되어 있지 않다. 이러한 접근 방식은 일반적으로 장비 내부에 설치되므로 강제 공기 냉각이 가장 효율적으로 사용되어 비용을 절감할 수 있다. 이러한 장치는 전문적인 설치가 필요하기 때문에 구성 요소로 간주되며, 따라서 안전을 위해 제품 하우징에 의존하고 요소로부터 보호한다.
시스템의 안전 및 성능을 위한 개방형 프레임 및 U-채널 PSU 설치 방법론대부분의 AC/DC 전원 공급 장치(PSU)는 개방 프레임 형식으로 제공되므로 완전히 밀폐되어 있지 않다. 이러한 접근 방식은 일반적으로 장비 내부에 설치되므로 강제 공기 냉각이 가장 효율적으로 사용되어 비용을 절감할 수 있다. 이러한 장치는 전문적인 설치가 필요하기 때문에 구성 요소로 간주되며, 따라서 안전을 위해 제품 하우징에 의존하고 요소로부터 보호한다. 부스트, 벅, 벅-부스트가 모두 가능한 범용성 뛰어난 LED 드라이버 ICLTM8042는 최대 1A 전류와 3000:1의 디밍 비율을 필요로 하는 LED를 지원할 수 있는 μModule® LED 드라이버 제품이다. 3V~30V의 입력 전압 범위와 250kHz~2MHz의 넓은 주파수 범위로 동작하므로 스캐너, 자동차 조명, 항공기 조명 같은 다양한 애플리케이션에 사용할 수 있다.
부스트, 벅, 벅-부스트가 모두 가능한 범용성 뛰어난 LED 드라이버 ICLTM8042는 최대 1A 전류와 3000:1의 디밍 비율을 필요로 하는 LED를 지원할 수 있는 μModule® LED 드라이버 제품이다. 3V~30V의 입력 전압 범위와 250kHz~2MHz의 넓은 주파수 범위로 동작하므로 스캐너, 자동차 조명, 항공기 조명 같은 다양한 애플리케이션에 사용할 수 있다.
 마이크로칩, 보안 기능을 확장한 maXTouch 터치스크린 컨트롤러 제품군 출시
마이크로칩, 보안 기능을 확장한 maXTouch 터치스크린 컨트롤러 제품군 출시 마우저, 2024년 1분기에 1만 종 이상의 신제품 추가
마우저, 2024년 1분기에 1만 종 이상의 신제품 추가 ST, 집약적 움직임 분석 지원하는 관성 모듈로 엣지-AI 센서 제품군 확장
ST, 집약적 움직임 분석 지원하는 관성 모듈로 엣지-AI 센서 제품군 확장 HMS 네트웍스, AGV를 위한 첨단 무선 기술 지원
HMS 네트웍스, AGV를 위한 첨단 무선 기술 지원 리미니스트리트 ‘2024 리미니스트리트 써밋’, 엔터프라이즈 소프트웨어 유지보수 혁신 지원
리미니스트리트 ‘2024 리미니스트리트 써밋’, 엔터프라이즈 소프트웨어 유지보수 혁신 지원
- ST, 2024 지속가능성 보고서 발표
- 마우저, IoT 및 에너지 하베스팅 설계 세미나 개최
- 매스웍스코리아, 다양한 분야의 AI 인재 발굴 위한 ‘제4회 매트랩 대학생 AI 경진대회’ 개최
- 다쏘시스템과 HD현대중공업, 버추얼 트윈 기반 설계-생산 일관화 통합 플랫폼 구축
- ams OSRAM과 도미넌트 옵토 테크놀로지스, 지능형 RGB LED로 스마트 자동차 실내 조명 구현
- 원프레딕트, 산업 AI 설비관리 솔루션으로 국제전기전력전시회 참가
그래픽 / 영상
 지멘스 EDA, 최첨단 SoC 설계를 위한 혁신적인 에뮬레이션 및 프로토타이핑 솔루션 발표
지멘스 EDA, 최첨단 SoC 설계를 위한 혁신적인 에뮬레이션 및 프로토타이핑 솔루션 발표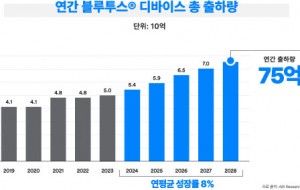 블루투스 지원 기기 출하량, 향후 5년 동안 연평균 8% 성장 전망
블루투스 지원 기기 출하량, 향후 5년 동안 연평균 8% 성장 전망 인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기
인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기
많이 본 뉴스
 알테라, 인텔에서 다시 FPGA 기업으로 독립
알테라, 인텔에서 다시 FPGA 기업으로 독립 엘리먼트14, 제품 수명 주기 지원을 혁신하는 설계, 제작, 유지보수 허브 출시
엘리먼트14, 제품 수명 주기 지원을 혁신하는 설계, 제작, 유지보수 허브 출시 팔로알토 네트웍스, 박상규 지사장 선임
팔로알토 네트웍스, 박상규 지사장 선임 유블럭스, 위치 정확도를 향상시키는 새로운 GNSS 플랫폼 출시
유블럭스, 위치 정확도를 향상시키는 새로운 GNSS 플랫폼 출시 로지텍, 프리미엄 RGB 게이밍 마이크 ‘YETI GX’ 출시
로지텍, 프리미엄 RGB 게이밍 마이크 ‘YETI GX’ 출시 키사이트, 신호 소스 분석기 포트폴리오 확장
키사이트, 신호 소스 분석기 포트폴리오 확장 로옴, 중국 세미드라이브와 스마트 콕핏용 레퍼런스 디자인 공동 개발
로옴, 중국 세미드라이브와 스마트 콕핏용 레퍼런스 디자인 공동 개발 R&S EPL1000 EMI 테스트 수신기, 최신 CISPR 14-1 컴플라이언스 테스트 지원
R&S EPL1000 EMI 테스트 수신기, 최신 CISPR 14-1 컴플라이언스 테스트 지원 써모 피셔, 인터배터리 2024에서 분석 토탈 솔루션 선보여
써모 피셔, 인터배터리 2024에서 분석 토탈 솔루션 선보여 두산디지털이노베이션, 아시아 최대 보안 전시회서 사이버보안 솔루션 선보여
두산디지털이노베이션, 아시아 최대 보안 전시회서 사이버보안 솔루션 선보여