
엔비디아(www.nvidia.co.kr CEO 젠슨 황)가 2022년 로스콘(ROSCon)에서 최신 아이작(Isaac) 로봇운영체제(ROS) 소프트웨어 릴리스인 개발자 프리뷰(DP) 2를 발표했다고 밝혔다. 이번 릴리스에는 ROS 2 개발자를 위한 추가 기능을 비롯하여 자율 이동 로봇(AMR) 플릿을 위한 새로운 클라우드와 엣지 투 로봇(edge-to-robot) 작업 관리, 모니터링 소프트웨어가 포함됐다.
미션 디스패치와 클라이언트는 차량 관리 시스템과 ROS 2 로봇 간에 작업을 할당하고 추적할 수 있는 표준형 오픈 소스 방법을 제공한다. 미션 디스패치와 클라이언트는 로봇 플릿을 위해 특별히 설계된 개방형 통신 표준인 VDA5050을 사용하여 통신한다. 메시지는 사물인터넷(IoT) 애플리케이션을 위한 경량 메시징 프로토콜인 MQTT를 통해 무선으로 전송된다.
미션 디스패치는 NGC에서 다운로드하거나 아이작 깃허브(Isaac GitHub)에서 소스 코드로 사용할 수 있는 컨테이너형 마이크로서비스로 차량 관리 시스템에 통합될 수 있다. 미션 디스패치는 오토 모터스(OTTO Motors)와 인오빗(InOrbit)이 개발하여 최근 발표한 VDA5050 커넥터와 같은 다른 오픈 소스 ROS 2 클라이언트와 상호 운용성을 갖는 것으로 확인됐다.
ROS 2 험블(Humble)과 호환되는 미션 클라이언트는 아이작 ROS 깃허브에서 패키지로 제공되며, Nav2 내비게이션 스택과 사전 통합되어 로봇에서 탐색 및 기타 작업을 할당하고 추적한다.
오토 모터스 CTO인 라이언 가리피(Ryan Gariepy)는 "현실 세계에서 모바일 로봇의 배포가 가속화됨에 따라 상호 운용성이 점점 중요해지고 있다. VDA5050과 ROS2를 오픈소스 커뮤니티로 연결하면 로봇 제조사가 차별화에 집중할 수 있는 동시에 차량 관리 솔루션의 혁신을 촉진할 수 있을 것이다”라고 말했다.
아이작 ROS는 AI 인식, 이미지 처리와 탐색을 위해 ROS 2 개발자 커뮤니티에 지속적으로 하드웨어 가속 성능을 제공한다. 자율 로봇은 첨단 AI와 컴퓨터 비전 능력이 필요하다. 엔비디아 아이작 ROS는 로보틱스 업계가 보다 쉽게 최첨단 기술을 적용할 수 있도록 하기 위한 노력의 결과물이다.
저작권©올포칩 미디어. 무단전재 및 재배포를 금지합니다.
 델 테크놀로지스, 메가존클라우드와 에이펙스 비즈니스 확대를 위한 MOU 체결양사는 전략적 협업의 첫번째 단계로 메가존클라우드가 투자하고 델 테크놀로지스가 지원하여 에이펙스 기반의 서비스와 솔루션을 홍보, 시연할 수 있는 ‘DMZ 클라우드 이그제큐티브 브리핑 센터(DMZ Cloud Executive Briefing Center, 이하 DMZ EBC)’를 구축했다. 양사는 24일 역삼동 메가존클라우드 본사에서 MOU 체결식과 함께 DMZ EBC의 개소식을 개최했다.
델 테크놀로지스, 메가존클라우드와 에이펙스 비즈니스 확대를 위한 MOU 체결양사는 전략적 협업의 첫번째 단계로 메가존클라우드가 투자하고 델 테크놀로지스가 지원하여 에이펙스 기반의 서비스와 솔루션을 홍보, 시연할 수 있는 ‘DMZ 클라우드 이그제큐티브 브리핑 센터(DMZ Cloud Executive Briefing Center, 이하 DMZ EBC)’를 구축했다. 양사는 24일 역삼동 메가존클라우드 본사에서 MOU 체결식과 함께 DMZ EBC의 개소식을 개최했다. kt cloud, ‘AI 클라우드’로 ‘초거대 AI’ 산업 선도한다초거대 AI란 대용량의 연산이 가능한 GPU 인프라를 바탕으로 대규모 데이터를 학습해 사람처럼 스스로 사고할 수 있도록 설계된 AI다. KT는 초거대 AI 사업을 본격적으로 추진하며 적기 학습을 위한 GPU 컴퓨팅 인프라를 확보하고자 kt cloud의 HAC와 NVIDIA의 GPU 어플라이언스를 병행 도입하기로 결정했다.
kt cloud, ‘AI 클라우드’로 ‘초거대 AI’ 산업 선도한다초거대 AI란 대용량의 연산이 가능한 GPU 인프라를 바탕으로 대규모 데이터를 학습해 사람처럼 스스로 사고할 수 있도록 설계된 AI다. KT는 초거대 AI 사업을 본격적으로 추진하며 적기 학습을 위한 GPU 컴퓨팅 인프라를 확보하고자 kt cloud의 HAC와 NVIDIA의 GPU 어플라이언스를 병행 도입하기로 결정했다. ST, 광범위한 스텝-다운 레귤레이션비 처리하는 동기식 벅 컨트롤러 출시컴팩트한 크기와 6V ~ 75V의 입력전압 범위를 지원하는 L3751 동기식 벅 컨트롤러는 산업용 장비에서 배터리로 구동되는 경량의 전기차 애플리케이션에 이르기까지 다양한 분야에 사용할 수 있다. 크기도 3.5mm x 4.5mm에 불과해 일반적으로 24V 및 48V 버스를 사용하는 통신 및 네트워킹 장비에도 적합하다.
ST, 광범위한 스텝-다운 레귤레이션비 처리하는 동기식 벅 컨트롤러 출시컴팩트한 크기와 6V ~ 75V의 입력전압 범위를 지원하는 L3751 동기식 벅 컨트롤러는 산업용 장비에서 배터리로 구동되는 경량의 전기차 애플리케이션에 이르기까지 다양한 분야에 사용할 수 있다. 크기도 3.5mm x 4.5mm에 불과해 일반적으로 24V 및 48V 버스를 사용하는 통신 및 네트워킹 장비에도 적합하다. KT, 스마트로봇으로 사회적 약자 관람 돕는다KT가 서울디자인재단과 함께 서울 중구 동대문디자인플라자 디자인쇼룸과 디자인홀에서 전시 관람들을 대상으로 ‘자율주행 스마트로봇체어’를 3주간 시범 운영한다고 밝혔다. 10월 24일부터 11월 11일까지 DDP를 방문한 관람객들은 자율주행 스마트로봇체어를 타고 디자인랩 3층 디자인홀 공간에서 NFT 특별전 등을 관람할 수 있다.
KT, 스마트로봇으로 사회적 약자 관람 돕는다KT가 서울디자인재단과 함께 서울 중구 동대문디자인플라자 디자인쇼룸과 디자인홀에서 전시 관람들을 대상으로 ‘자율주행 스마트로봇체어’를 3주간 시범 운영한다고 밝혔다. 10월 24일부터 11월 11일까지 DDP를 방문한 관람객들은 자율주행 스마트로봇체어를 타고 디자인랩 3층 디자인홀 공간에서 NFT 특별전 등을 관람할 수 있다. NXP 오렌지박스, 단일 도메인 컨트롤러로 차량 무선 연결 통합오렌지박스는 차량의 게이트웨이와 유무선 기술 간의 통합 인터페이스를 제공하는 보안 강화 모듈식 단일 개발 플랫폼이다. 이를 통해 차세대 자동차가 주변 세상과 안전하게 소통할 수 있는 수단을 제공한다. 오렌지박스는 현재 그리고 새로운 외부 무선 인터페이스를 보안이 강화된 단일 연결 도메인 컨트롤러로 통합한 다음 NXP 고속 이더넷(Ethernet)을 통해 보안 차량 게이트웨이에 연결한다.
NXP 오렌지박스, 단일 도메인 컨트롤러로 차량 무선 연결 통합오렌지박스는 차량의 게이트웨이와 유무선 기술 간의 통합 인터페이스를 제공하는 보안 강화 모듈식 단일 개발 플랫폼이다. 이를 통해 차세대 자동차가 주변 세상과 안전하게 소통할 수 있는 수단을 제공한다. 오렌지박스는 현재 그리고 새로운 외부 무선 인터페이스를 보안이 강화된 단일 연결 도메인 컨트롤러로 통합한 다음 NXP 고속 이더넷(Ethernet)을 통해 보안 차량 게이트웨이에 연결한다. ST, CAN FD 조명 기반의 다중 픽셀 드라이버로 차세대 자동차 조명 지원ST가 경량의 CAN FD 조명 프로토콜로 자동차 조명을 동적으로 제어하는 편리한 통합 솔루션인 L99LDLH32 선형 전류 레귤레이터 드라이버를 출시했다. 이 새로운 드라이버는 작은 표면적에서 밝고 균일한 고대비 조명을 제공하는 OLED 램프와 함께 사용하는 데 매우 적합하며, 설계자들이 복잡한 조명 패턴 및 효과를 만들어 안전성과 스타일을 향상시키도록 해준다
ST, CAN FD 조명 기반의 다중 픽셀 드라이버로 차세대 자동차 조명 지원ST가 경량의 CAN FD 조명 프로토콜로 자동차 조명을 동적으로 제어하는 편리한 통합 솔루션인 L99LDLH32 선형 전류 레귤레이터 드라이버를 출시했다. 이 새로운 드라이버는 작은 표면적에서 밝고 균일한 고대비 조명을 제공하는 OLED 램프와 함께 사용하는 데 매우 적합하며, 설계자들이 복잡한 조명 패턴 및 효과를 만들어 안전성과 스타일을 향상시키도록 해준다 엑시스코리아, 무인 매장 선호도 조사엑시스는 소비자 조사 분석 기관인 ‘밀리우 인사이트(Milieu Insight)’에 의뢰하여 APAC 내 9개국에서 진행했으며, 대한민국에서도 1천명을 대상으로 조사했다. 조사에 따르면 한국 소비자들은 팬데믹 이후 오프라인 매장을 방문하거나 쇼핑하는 경향이 적었다. 이는 슈퍼마켓, 편의점, 주유소, 약국, 제과점 및 식료품점을 포함한 모든 유형의 상점에 적용된다.
엑시스코리아, 무인 매장 선호도 조사엑시스는 소비자 조사 분석 기관인 ‘밀리우 인사이트(Milieu Insight)’에 의뢰하여 APAC 내 9개국에서 진행했으며, 대한민국에서도 1천명을 대상으로 조사했다. 조사에 따르면 한국 소비자들은 팬데믹 이후 오프라인 매장을 방문하거나 쇼핑하는 경향이 적었다. 이는 슈퍼마켓, 편의점, 주유소, 약국, 제과점 및 식료품점을 포함한 모든 유형의 상점에 적용된다. 마우저, 업계에서 가장 다양한 교세라 AVX 제품 공급마우저가 공급하는 교세라 AVX의 광범위한 고급 커패시터와 초고성능 안테나, 조명 솔루션의 주요 제품 중 교세라 SLD Laser LaserLight 표면 실장 장치(SMD)는 7mm의 작은 설치 공간으로 제공되는 고휘도 및 백색 레이저 조명 이미터 제품이다. 이 LaserLight SMD 제품은 매우 긴 빔 거리, 좁은 빔 각도 및 작은 광학 크기를 지원한다.
마우저, 업계에서 가장 다양한 교세라 AVX 제품 공급마우저가 공급하는 교세라 AVX의 광범위한 고급 커패시터와 초고성능 안테나, 조명 솔루션의 주요 제품 중 교세라 SLD Laser LaserLight 표면 실장 장치(SMD)는 7mm의 작은 설치 공간으로 제공되는 고휘도 및 백색 레이저 조명 이미터 제품이다. 이 LaserLight SMD 제품은 매우 긴 빔 거리, 좁은 빔 각도 및 작은 광학 크기를 지원한다. 마우저, 개발 키트 및 엔지니어링 도구를 위한 리소스 제공마우저의 개발 키트 리소스 사이트에 수록된 다양한 기사, 비디오 및 사용법 가이드는 엔지니어들에게 새로운 설계 개발에 필요한 제품과 노하우를 제공한다. 엔지니어링 도구 페이지는 새로운 개발 키트, 레퍼런스 설계 등에 대한 신제품 컬렉션을 제공하며 엔지니어가 주요 제조사들의 최신 제품을 접할 수 있도록 지원한다.
마우저, 개발 키트 및 엔지니어링 도구를 위한 리소스 제공마우저의 개발 키트 리소스 사이트에 수록된 다양한 기사, 비디오 및 사용법 가이드는 엔지니어들에게 새로운 설계 개발에 필요한 제품과 노하우를 제공한다. 엔지니어링 도구 페이지는 새로운 개발 키트, 레퍼런스 설계 등에 대한 신제품 컬렉션을 제공하며 엔지니어가 주요 제조사들의 최신 제품을 접할 수 있도록 지원한다. 인텔코리아, ‘엣지 AI 소프트웨어 플랫폼’ 웨비나 개최인텔코리아 정태욱 전무는 지난 9월 인텔 이노베이션에서 소개한 인텔 게티 (Intel Geti) 솔루션과 인텔 오픈비노(OpenVINO) 플랫폼을 바탕으로 적은 양의 데이터로 효율적인 AI 모델 구축, 학습 및 추론이 가능하다고 소개했다. 더불어 엣지 AI 구축시 반드시 요구되는 사항으로 데이터 처리가 빠르게 진행되고, 해킹으로부터 안전해야 하며, 비교적 낮은 전력으로 구동되어야 한다고 밝혔다.
인텔코리아, ‘엣지 AI 소프트웨어 플랫폼’ 웨비나 개최인텔코리아 정태욱 전무는 지난 9월 인텔 이노베이션에서 소개한 인텔 게티 (Intel Geti) 솔루션과 인텔 오픈비노(OpenVINO) 플랫폼을 바탕으로 적은 양의 데이터로 효율적인 AI 모델 구축, 학습 및 추론이 가능하다고 소개했다. 더불어 엣지 AI 구축시 반드시 요구되는 사항으로 데이터 처리가 빠르게 진행되고, 해킹으로부터 안전해야 하며, 비교적 낮은 전력으로 구동되어야 한다고 밝혔다. 풋프린트 호환 패키지로 150V까지 확장된 GaN 제품군, 높은 전력밀도 애플리케이션의 유연한 설계 지원EPC는 열 성능이 향상된 QFN 패키지 기반의 150V EPC2308을 출시하고, 상용 GaN FET 제품군을 확장했다고 밝혔다. 이 디바이스는 전동공구 및 로봇의 모터 드라이브와 산업용 애플리케이션을 위한 80V - 100V 고밀도 DC-DC를 비롯해 충전기, 어댑터, 전원공급장치를 위한 28V – 54V 동기식 정류기, 스마트폰 USB 고속 충전기, 태양광 옵티마이저 및 마이크로 인버터를 위해 설계되었다.
풋프린트 호환 패키지로 150V까지 확장된 GaN 제품군, 높은 전력밀도 애플리케이션의 유연한 설계 지원EPC는 열 성능이 향상된 QFN 패키지 기반의 150V EPC2308을 출시하고, 상용 GaN FET 제품군을 확장했다고 밝혔다. 이 디바이스는 전동공구 및 로봇의 모터 드라이브와 산업용 애플리케이션을 위한 80V - 100V 고밀도 DC-DC를 비롯해 충전기, 어댑터, 전원공급장치를 위한 28V – 54V 동기식 정류기, 스마트폰 USB 고속 충전기, 태양광 옵티마이저 및 마이크로 인버터를 위해 설계되었다. 마이크로칩, 저전력 블루투스 기능을 통합한 새로운 Arm 기반 PIC 마이크로컨트롤러 출시마이크로칩의 PIC32CX-BZ2 MCU 제품군은 가용성 및 복잡성 문제에서부터 규제 인증 장벽과 장기적 지원 문제에 이르기까지 무선 애플리케이션의 시장 출시에 한계로 지적되던 여러 문제점을 없애 준다, 특히 마이크로칩 제품군은 수십 년간의 전문적인 경험을 바탕으로 구축된 MCU와 무선 연결 기능을 긴밀하게 통합한다.
마이크로칩, 저전력 블루투스 기능을 통합한 새로운 Arm 기반 PIC 마이크로컨트롤러 출시마이크로칩의 PIC32CX-BZ2 MCU 제품군은 가용성 및 복잡성 문제에서부터 규제 인증 장벽과 장기적 지원 문제에 이르기까지 무선 애플리케이션의 시장 출시에 한계로 지적되던 여러 문제점을 없애 준다, 특히 마이크로칩 제품군은 수십 년간의 전문적인 경험을 바탕으로 구축된 MCU와 무선 연결 기능을 긴밀하게 통합한다.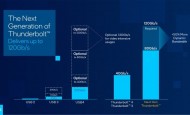 인텔, 업계 선도할 차세대 썬더볼트 제품 발표인텔이 새롭게 선보인 차세대 썬더볼트는 초당 80Gbps의 양방향 대역폭을 제공하며, 최고의 디스플레이 경험을 위해 최대 120Gbps까지 지원해 컨텐츠 크리에이터 및 게이머들의 증가하는 요구사항을 충족한다. 더불어 이전 썬더볼트 및 USB 버전과의 호환성을 제공한다.
인텔, 업계 선도할 차세대 썬더볼트 제품 발표인텔이 새롭게 선보인 차세대 썬더볼트는 초당 80Gbps의 양방향 대역폭을 제공하며, 최고의 디스플레이 경험을 위해 최대 120Gbps까지 지원해 컨텐츠 크리에이터 및 게이머들의 증가하는 요구사항을 충족한다. 더불어 이전 썬더볼트 및 USB 버전과의 호환성을 제공한다. 하이크비전, 친환경 영상저장장치 ‘eDVR’ 시리즈 출시하이크비전 eDVR 시리즈는 칩 레벨의 eSSD 기술을 적용하여 스핀들 모터 엔진이 내장되어 있지 않기 때문에 기존 DVR에 비해 에너지 소비량이 45% 감소했다. 이러한 초저전력 소비를 통해 장기적인 에너지 비용을 절약할 뿐만 아니라 탄소 배출량도 감소시킬 수 있다. HDD 드라이브를 사용하는 기존 DVR보다 내구성이 높아 제품 수명 주기가 긴 점 역시 지속 가능성에 기여할 수 있다.
하이크비전, 친환경 영상저장장치 ‘eDVR’ 시리즈 출시하이크비전 eDVR 시리즈는 칩 레벨의 eSSD 기술을 적용하여 스핀들 모터 엔진이 내장되어 있지 않기 때문에 기존 DVR에 비해 에너지 소비량이 45% 감소했다. 이러한 초저전력 소비를 통해 장기적인 에너지 비용을 절약할 뿐만 아니라 탄소 배출량도 감소시킬 수 있다. HDD 드라이브를 사용하는 기존 DVR보다 내구성이 높아 제품 수명 주기가 긴 점 역시 지속 가능성에 기여할 수 있다.
 인텔 파운드리, 고개구율 극자외선(High-NA EUV) 도입으로 칩 제조 분야 선도
인텔 파운드리, 고개구율 극자외선(High-NA EUV) 도입으로 칩 제조 분야 선도 NXP, 연간 기업 지속 가능성 보고서 - ESG 목표 달성 현황 공개
NXP, 연간 기업 지속 가능성 보고서 - ESG 목표 달성 현황 공개 로데슈바르즈, 획기적인 성능으로 무장한 R&S NGC100 파워 서플라이 제품군 신규 출시
로데슈바르즈, 획기적인 성능으로 무장한 R&S NGC100 파워 서플라이 제품군 신규 출시 IMDT와 Hailo가 합작하여 최고의 실시간 성능을 위한 엣지 AI 솔루션 출시
IMDT와 Hailo가 합작하여 최고의 실시간 성능을 위한 엣지 AI 솔루션 출시 콩가텍, 인텔 코어 i3 및 인텔 아톰 x7000RE 프로세서 탑재 SMARC 모듈 출시
콩가텍, 인텔 코어 i3 및 인텔 아톰 x7000RE 프로세서 탑재 SMARC 모듈 출시
- 인텔, 세계 최대규모 뉴로모픽 시스템 공개
- 마이크로칩, 항공기 전기화 전화를 간소화하는 통합 구동 파워 솔루션 출시
- 텔레다인르크로이, 광범위한 통신 기술 데이터를 원활하게 포착하는 프론트라인 X500e 출시
- TTTech Auto, 복잡한 소프트웨어 통합을 혁신할 차세대 스케줄러 ‘MotionWise Schedule’ 출시
- 아이스아이, 글로벌 SAR 리더십 확장을 위한 기업의 성장 펀딩 라운드 초과 달성
- 오나인솔루션즈, 생성형 AI 기술 적용해 ‘o9 Digital Brain’ 플랫폼 강화
그래픽 / 영상
 결정론, 새로운 이더넷 애플리케이션을 열다
결정론, 새로운 이더넷 애플리케이션을 열다 AMD, 새로운 2세대 버설 적응형 SoC로 AI 기반 임베디드 시스템의 종단간 가속 지원
AMD, 새로운 2세대 버설 적응형 SoC로 AI 기반 임베디드 시스템의 종단간 가속 지원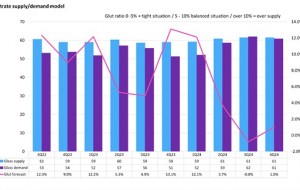 2024년, 디스플레이 글래스 산업 공급부족 우려
2024년, 디스플레이 글래스 산업 공급부족 우려
많이 본 뉴스
 마이크로소프트, AI 기반 통합 보안 솔루션 ‘코파일럿 포 시큐리티’ 공개
마이크로소프트, AI 기반 통합 보안 솔루션 ‘코파일럿 포 시큐리티’ 공개 콩가텍, 고성능 임베디드 빌딩 블록 aReady.COM(컴퓨터 온 모듈) 출시
콩가텍, 고성능 임베디드 빌딩 블록 aReady.COM(컴퓨터 온 모듈) 출시 ST, 창의적 센싱 개발을 위한 올인원 MEMS 스튜디오 데스크톱 소프트웨어 솔루션 출시
ST, 창의적 센싱 개발을 위한 올인원 MEMS 스튜디오 데스크톱 소프트웨어 솔루션 출시 어플라이드 머티어리얼즈, 옹스트롬 시대를 위한 패터닝 솔루션 포트폴리오 확대
어플라이드 머티어리얼즈, 옹스트롬 시대를 위한 패터닝 솔루션 포트폴리오 확대 로데슈바르즈, 와이파이 7 연구개발 및 생산을 위한 멀티 채널 테스트 솔루션 공개
로데슈바르즈, 와이파이 7 연구개발 및 생산을 위한 멀티 채널 테스트 솔루션 공개 로지텍, 프리미엄 RGB 게이밍 마이크 ‘YETI GX’ 출시
로지텍, 프리미엄 RGB 게이밍 마이크 ‘YETI GX’ 출시 엔비디아, AI 인프라에 최적화된 새로운 네트워킹 스위치 X800 시리즈 발표
엔비디아, AI 인프라에 최적화된 새로운 네트워킹 스위치 X800 시리즈 발표 레노버, AI PC 혁신의 미래 제시
레노버, AI PC 혁신의 미래 제시 GaN FET를 이용한 고성능 클래스-D 오디오 증폭기 설계
GaN FET를 이용한 고성능 클래스-D 오디오 증폭기 설계 힐셔, 두 번째로 독일 혁신 기업 TOP 100에 선정
힐셔, 두 번째로 독일 혁신 기업 TOP 100에 선정