
인텔 랩(Intel Lab)은 이탈리아 기술연구원(Italian Institute of Technology) 및 독일 뮌헨 공과대학교(Technical University of Munich)와 협력해 신경망 기반 객체 학습에 대한 새로운 접근방식을 도입했다고 밝혔다. 이번 발표는 특히, 물류, 헬스케어 또는 노인 의료와 같은 제약 없는 환경과 상호작용하는 로봇 등 미래 애플리케이션을 대상으로 한다. 아울러, 새로운 대화형 온라인 객체 학습 방법을 통해 뉴로모픽 컴퓨팅을 사용, 로봇이 배치된 이후에도 추가적인 객체 학습을 추가하도록 지원한다.
인텔은 이탈리아 기술연구원 및 뮌헨 공과대학교와 함께 인텔의 뉴로모픽 연구 칩 로이히(Loihi) 상에서 신규 모델을 적용한 새로운 객체 인스턴스 학습을 시연했다. 그 결과, 기존 중앙처리장치(CPU) 대비 약 175배 낮은 전력을 사용하면서도 기존 CPU와 유사하거나 더 나은 속도와 정확성을 보이며 지속적인 대화형 학습을 성공적으로 구현했다. 연구원들은 이를 위해 단일 플라스틱 시냅스 레이어에서만 학습할 수 있도록 범위를 제한했으며, 필요에 따라 새로운 뉴런을 확보함에 따라 로이히 상에 다른 객체 뷰(object views)를 설명하는 신경망 아키텍처를 구현했다. 본 신경망 아키텍처는 사용자와 상호작용하며 학습 과정을 자율적으로 전개할 수 있었다.

시뮬레이션에서 로봇이 눈을 움직여 물체를 능동적으로 감지하고 있다
이번 연구 결과는 오크리지 국립연구소(Oak Ridge National Laboratory)가 주최한 올해 국제 뉴로모픽 시스템학회(ICON)에서 최고의 논문으로 선정된 ‘로봇을 위한 지속 대화형 학습: 뉴로모픽 접근법’에 포함되어 있다.
율리아 산다미르스카야(Yulia Sandamirskaya) 인텔 뉴로모픽 컴퓨팅 연구소 로봇 연구 책임자 및 논문의 대표 저자는 “인간이 새로운 물체를 학습할 때, 물체를 자세히 보고, 돌려보고, 무엇인지 물어보는 과정을 거친다. 이후, 다양한 상황 또는 환경에서도 해당 물체를 즉시 인식할 수 있다”며 “우리의 목표는 상호작용하는 환경에서 작동하는 미래 로봇에 유사한 기능을 적용해, 예측하지 못한 상황에 적응하고 인간과 함께 더 자연스럽게 일할 수 있도록 하는 것이다. 이번 로이히 칩으로 거둔 성과를 통해 로봇 공학의 미래를 위한 뉴로모픽 컴퓨팅의 가치를 한층 강화했다”고 말했다.
저작권©올포칩 미디어. 무단전재 및 재배포를 금지합니다.
 퀀텀, AWS 마켓플레이스에 ‘퀀텀 스토어넥스트 파일 시스템’ 등록이제 사용자들은 AWS 마켓플레이스를 통해 신속하게 스토어넥스트(StorNext) 공유 스토리지를 구축할 수 있으며, 클라우드를 기반으로 어디서나 한팀으로서 영상 편집 작업을 협업할 수 있게 되었다. 또한, 사용자간 파일을 복사하거나 전송할 필요 없이 데이터에 원격으로 액세스하고 협업함으로써 후반 작업 워크플로우의 속도를 높일 수 있게 되었다.
퀀텀, AWS 마켓플레이스에 ‘퀀텀 스토어넥스트 파일 시스템’ 등록이제 사용자들은 AWS 마켓플레이스를 통해 신속하게 스토어넥스트(StorNext) 공유 스토리지를 구축할 수 있으며, 클라우드를 기반으로 어디서나 한팀으로서 영상 편집 작업을 협업할 수 있게 되었다. 또한, 사용자간 파일을 복사하거나 전송할 필요 없이 데이터에 원격으로 액세스하고 협업함으로써 후반 작업 워크플로우의 속도를 높일 수 있게 되었다. Moxa, 오토메이션 타이페이 2022에서 디지털 혁신을 위한 최신 TSN 솔루션 공개Moxa는 산업자동화 전시회인 오토메이션 타이페이 2022(Automation Taipei 2022)에서 최신 TSN(Time-Sensitive Networking, 시간 민감형 네트워킹) 솔루션의 발전 사항과 단일 통합 네트워크를 위한 TSN 에코시스템에 대해 여러 혁신 성과를 발표했다. 최근 TSN 에코시스템에서 공동으로 개발한 데모를 통해 산업 디지털 혁신을 가속화하는 새로운 발전 경로와 가능성을 제시했다.
Moxa, 오토메이션 타이페이 2022에서 디지털 혁신을 위한 최신 TSN 솔루션 공개Moxa는 산업자동화 전시회인 오토메이션 타이페이 2022(Automation Taipei 2022)에서 최신 TSN(Time-Sensitive Networking, 시간 민감형 네트워킹) 솔루션의 발전 사항과 단일 통합 네트워크를 위한 TSN 에코시스템에 대해 여러 혁신 성과를 발표했다. 최근 TSN 에코시스템에서 공동으로 개발한 데모를 통해 산업 디지털 혁신을 가속화하는 새로운 발전 경로와 가능성을 제시했다. 사피온 ‘X220’, MLPerf 벤치마크서 세계 최고 수준 AI 성능 입증사피온의 ‘X220’이 MLPerf의 데이터센터 추론 벤치마크에서 엔비디아 A2 보다 X220-Compact은 2.3배, X220-Enterprise는 4.6배 높은 성능을 달성하였다. 또한 전력소모 당 성능 측면에서도 엔비디아 A2 보다 X220-Compact은 2.2배, X220-Enterprise는 2.0배 높은 효율성을 달성하였다.
사피온 ‘X220’, MLPerf 벤치마크서 세계 최고 수준 AI 성능 입증사피온의 ‘X220’이 MLPerf의 데이터센터 추론 벤치마크에서 엔비디아 A2 보다 X220-Compact은 2.3배, X220-Enterprise는 4.6배 높은 성능을 달성하였다. 또한 전력소모 당 성능 측면에서도 엔비디아 A2 보다 X220-Compact은 2.2배, X220-Enterprise는 2.0배 높은 효율성을 달성하였다. 웨스턴디지털, WD_BLACK 게이밍 SSD 신제품 2종 출시최신 기술과 엔터테인먼트의 접점에 있는 웨스턴디지털의 WD_BLACK 브랜드는 게이머를 위해 혁신적인 맞춤형 스토리지 솔루션을 제공한다. 웨스턴디지털은 이번 출시를 통해 국내 PC 및 콘솔 게이머에게 스토리지 업그레이드를 위한 고성능 솔루션을 지원할 계획이다.
웨스턴디지털, WD_BLACK 게이밍 SSD 신제품 2종 출시최신 기술과 엔터테인먼트의 접점에 있는 웨스턴디지털의 WD_BLACK 브랜드는 게이머를 위해 혁신적인 맞춤형 스토리지 솔루션을 제공한다. 웨스턴디지털은 이번 출시를 통해 국내 PC 및 콘솔 게이머에게 스토리지 업그레이드를 위한 고성능 솔루션을 지원할 계획이다. 웨스턴디지털, ‘프로 블레이드’ 라인업 국내 출시프로 블레이드 제품군은 새로운 탈부착식 형태를 통해 손쉬운 용량 확장과 탁월한 휴대성을 주요 특징으로 한다. 유저들은 가벼운 무게와 대용량을 갖춘 ‘프로 블레이드 SSD 맥’ SSD 장치를 ‘프로 블레이드 트랜스포트’ 포터블 SSD 케이스와 ‘프로 블레이드 스테이션’ 데스크탑 시스템 안에 손쉽게 설치하고 교체할 수 있어 테라바이트급 스토리지 기기를 간편하게 휴대할 수 있다.
웨스턴디지털, ‘프로 블레이드’ 라인업 국내 출시프로 블레이드 제품군은 새로운 탈부착식 형태를 통해 손쉬운 용량 확장과 탁월한 휴대성을 주요 특징으로 한다. 유저들은 가벼운 무게와 대용량을 갖춘 ‘프로 블레이드 SSD 맥’ SSD 장치를 ‘프로 블레이드 트랜스포트’ 포터블 SSD 케이스와 ‘프로 블레이드 스테이션’ 데스크탑 시스템 안에 손쉽게 설치하고 교체할 수 있어 테라바이트급 스토리지 기기를 간편하게 휴대할 수 있다.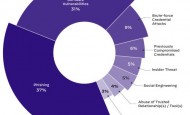 팔로알토 네트웍스, 2022 인시던트 대응 보고서 발표보고서에 따르면 랜섬웨어로부터 몸값을 지불하도록 요구된 금액이 가장 높은 업종은 금융과 부동산으로, 평균 금액은 각각 평균 800만 달러, 520만 달러에 육박했다. 지난 12개월 동안 가장 빈번하게 발생한 공격 유형은 전체 인시던트 대응의 70%를 차지하는 랜섬웨어와 기업 이메일을 침해하는 ‘BEC공격(business email compromise)’ 인 것으로 조사됐다.
팔로알토 네트웍스, 2022 인시던트 대응 보고서 발표보고서에 따르면 랜섬웨어로부터 몸값을 지불하도록 요구된 금액이 가장 높은 업종은 금융과 부동산으로, 평균 금액은 각각 평균 800만 달러, 520만 달러에 육박했다. 지난 12개월 동안 가장 빈번하게 발생한 공격 유형은 전체 인시던트 대응의 70%를 차지하는 랜섬웨어와 기업 이메일을 침해하는 ‘BEC공격(business email compromise)’ 인 것으로 조사됐다. ST, 안전 시스템 지원하는 고속 시동 부하 스위치 출시ST의 지능형 전원 스위치 제품군의 유사한 단일 채널 및 듀얼 디바이스와 마찬가지로, IPS1025HF는 프로그래밍이 가능한 두 개의 전류제한 설정을 갖춰 사용자는 전원 스위치를 활성화할 때 더 높은 전류 제한값을 프로그래밍할 수 있다. 이를 통해 초기 피크 전류가 높아야 하는 전구 램프, 모터, 용량성 부하와 같은 구동 부하에 대해 유연성을 높일 수 있다.
ST, 안전 시스템 지원하는 고속 시동 부하 스위치 출시ST의 지능형 전원 스위치 제품군의 유사한 단일 채널 및 듀얼 디바이스와 마찬가지로, IPS1025HF는 프로그래밍이 가능한 두 개의 전류제한 설정을 갖춰 사용자는 전원 스위치를 활성화할 때 더 높은 전류 제한값을 프로그래밍할 수 있다. 이를 통해 초기 피크 전류가 높아야 하는 전구 램프, 모터, 용량성 부하와 같은 구동 부하에 대해 유연성을 높일 수 있다. KT, 빅데이터로 실시간 인구 혼잡도 알려준다KT의 실시간 인구 데이터는 주요 지역 기지국에서 5분 동안 수집된 휴대폰 신호 빅데이터를 집계하고 가공해 현 시점에 특정 지역에 존재하는 인구를 추정할 수 있도록 설계했다. 이를 활용하면 각 지자체에선 주요 장소별 인구 혼잡도를 실시간으로 확인함으로써 신속하고 선제적인 정책 수립과 대응체계 마련이 가능해진다.
KT, 빅데이터로 실시간 인구 혼잡도 알려준다KT의 실시간 인구 데이터는 주요 지역 기지국에서 5분 동안 수집된 휴대폰 신호 빅데이터를 집계하고 가공해 현 시점에 특정 지역에 존재하는 인구를 추정할 수 있도록 설계했다. 이를 활용하면 각 지자체에선 주요 장소별 인구 혼잡도를 실시간으로 확인함으로써 신속하고 선제적인 정책 수립과 대응체계 마련이 가능해진다. 깃랩 제6차 연례 글로벌 데브섹옵스 조사 결과 발표, 데브옵스 플랫폼 채택의 핵심 원동력은 ‘보안’깃랩의 2022년 글로벌 데브섹옵스 조사에 따르면, 아시아 지역이 평균보다 높은 데브옵스 플랫폼 채택률과 개발 주기 자동화 실현을 기록한 것으로 나타났다. 또한 보안 및 컴플라이언스가 지속적으로 우선순위를 차지하고 있으며, 툴체인 통합에 대한 투자와 데브옵스 채택 가속화에 따른 영향이 지속되고 있음을 알 수 있다.
깃랩 제6차 연례 글로벌 데브섹옵스 조사 결과 발표, 데브옵스 플랫폼 채택의 핵심 원동력은 ‘보안’깃랩의 2022년 글로벌 데브섹옵스 조사에 따르면, 아시아 지역이 평균보다 높은 데브옵스 플랫폼 채택률과 개발 주기 자동화 실현을 기록한 것으로 나타났다. 또한 보안 및 컴플라이언스가 지속적으로 우선순위를 차지하고 있으며, 툴체인 통합에 대한 투자와 데브옵스 채택 가속화에 따른 영향이 지속되고 있음을 알 수 있다. AMD, “젠4” 아키텍처 기반 라이젠 7000 시리즈 데스크톱 프로세서로 전례 없는 게이밍 경험 제공라이젠 7000 시리즈는 AMD Zen 4 아키텍처와 TSMC의 5nm 공정 기술을 기반으로 설계됐으며, 최대 16코어 32스레드의 강력한 성능과 선도적인 전력 효율성으로 전 세계 게이머, 크리에이터 및 PC 마니아에게 전례 없는 컴퓨팅 경험을 선사한다. 최상위 제품인 AMD Ryzen 7950X는 이전 세대 동급 제품 대비 싱글 코어 성능이 최대 29% 향상됐다.
AMD, “젠4” 아키텍처 기반 라이젠 7000 시리즈 데스크톱 프로세서로 전례 없는 게이밍 경험 제공라이젠 7000 시리즈는 AMD Zen 4 아키텍처와 TSMC의 5nm 공정 기술을 기반으로 설계됐으며, 최대 16코어 32스레드의 강력한 성능과 선도적인 전력 효율성으로 전 세계 게이머, 크리에이터 및 PC 마니아에게 전례 없는 컴퓨팅 경험을 선사한다. 최상위 제품인 AMD Ryzen 7950X는 이전 세대 동급 제품 대비 싱글 코어 성능이 최대 29% 향상됐다. 클래로티 2022 상반기 XIoT 보안 현황 보고서 발표2022년 상반기 XIoT 보안 현황 보고서에 따르면, 같은 기간 동안 공급업체가 자체적으로 공개한 취약성이 69% 증가했다. 독립 조사기관 발표보다 공급 업체의 공개가 더 많이 보고된 것은 이번이 처음이다. 전체 또는 부분적으로 수정된 펌웨어 취약성도 79% 증가했다. 펌웨어 패치에서 취약성을 해결하는 것이 최초 소프트웨어 배포보다 상대적으로 어려운 점을 감안할 때 주목할 만한 개선이 이뤄진 것으로 볼 수 있다.
클래로티 2022 상반기 XIoT 보안 현황 보고서 발표2022년 상반기 XIoT 보안 현황 보고서에 따르면, 같은 기간 동안 공급업체가 자체적으로 공개한 취약성이 69% 증가했다. 독립 조사기관 발표보다 공급 업체의 공개가 더 많이 보고된 것은 이번이 처음이다. 전체 또는 부분적으로 수정된 펌웨어 취약성도 79% 증가했다. 펌웨어 패치에서 취약성을 해결하는 것이 최초 소프트웨어 배포보다 상대적으로 어려운 점을 감안할 때 주목할 만한 개선이 이뤄진 것으로 볼 수 있다. 하이크비전, 수자원 관리 및 홍수 예방 위한 AIoT 원격 모니터링 솔루션 발표하이크비전의 AIoT 기반의 원격 모니터링 솔루션을 통해 24시간 실시간으로 강의 상태를 추적할 수 있다. 데이터가 수집되어 관리 시스템으로 직접 전송되므로 수자원 운영 현황을 쉽게 파악하여 관리하는데 효율적이다. 수위 인식 알고리즘 등의 기술을 통해 수위 변화를 파악하고, 데이터를 수집 및 현장 사진 저장으로 후속 데이터 검증 역시 용이하다.
하이크비전, 수자원 관리 및 홍수 예방 위한 AIoT 원격 모니터링 솔루션 발표하이크비전의 AIoT 기반의 원격 모니터링 솔루션을 통해 24시간 실시간으로 강의 상태를 추적할 수 있다. 데이터가 수집되어 관리 시스템으로 직접 전송되므로 수자원 운영 현황을 쉽게 파악하여 관리하는데 효율적이다. 수위 인식 알고리즘 등의 기술을 통해 수위 변화를 파악하고, 데이터를 수집 및 현장 사진 저장으로 후속 데이터 검증 역시 용이하다. 마이크론, 데이터 집약 애플리케이션을 위한 ‘DDR5 서버 DRAM’ 출시DDR5 메모리는 DDR4 DRAM 대비 시스템 성능을 최대 85%까지 증가시킨다. 마이크론의 새로운 서버 DDR5 메모리는 DDR4 기술로 지원 가능한 것보다 많은 CPU 연산 용량 및 메모리 대역폭을 필요로 하는 AI, HPC 및 데이터 집약적 애플리케이션의 성능을 극대화한다.
마이크론, 데이터 집약 애플리케이션을 위한 ‘DDR5 서버 DRAM’ 출시DDR5 메모리는 DDR4 DRAM 대비 시스템 성능을 최대 85%까지 증가시킨다. 마이크론의 새로운 서버 DDR5 메모리는 DDR4 기술로 지원 가능한 것보다 많은 CPU 연산 용량 및 메모리 대역폭을 필요로 하는 AI, HPC 및 데이터 집약적 애플리케이션의 성능을 극대화한다. 인텔, 지능형 비주얼 클라우드를 위한 데이터센터용 ‘인텔 플렉스 시리즈 GPU’ 발표이번 발표한 신규 GPU 제품은 고립되고 사용 제한된 환경의 제약에서 자유롭도록 지원하며, 데이터센터가 별도의 개별 솔루션을 사용할 필요를 절감하도록 지원한다. 인텔은 성능 또는 품질에 영향을 주지 않으면서 광범위한 워크로드를 유연하게 처리하도록 구축된 단일 GPU 솔루션을 제공한다.
인텔, 지능형 비주얼 클라우드를 위한 데이터센터용 ‘인텔 플렉스 시리즈 GPU’ 발표이번 발표한 신규 GPU 제품은 고립되고 사용 제한된 환경의 제약에서 자유롭도록 지원하며, 데이터센터가 별도의 개별 솔루션을 사용할 필요를 절감하도록 지원한다. 인텔은 성능 또는 품질에 영향을 주지 않으면서 광범위한 워크로드를 유연하게 처리하도록 구축된 단일 GPU 솔루션을 제공한다.
 데이터브릭스, 기업의 AI 수요 급증에 연 100% 이상 비즈니스 성장 달성 쾌거
데이터브릭스, 기업의 AI 수요 급증에 연 100% 이상 비즈니스 성장 달성 쾌거 전 세계 기업의 63%, 제로 트러스트 전략 도입할 방침
전 세계 기업의 63%, 제로 트러스트 전략 도입할 방침 키사이트, 큐비트 설계를 위한 최초의 통합형 EDA 워크플로우를 제공하는 ‘퀀텀프로’ 출시
키사이트, 큐비트 설계를 위한 최초의 통합형 EDA 워크플로우를 제공하는 ‘퀀텀프로’ 출시 로지텍, 첫 60% 배열 게이밍 키보드 ‘PRO X 60 LIGHTSPEED’ 출시
로지텍, 첫 60% 배열 게이밍 키보드 ‘PRO X 60 LIGHTSPEED’ 출시 지멘스 Simcenter 솔루션, 이모터스의 e-드라이브 소음진동 테스트에 채택
지멘스 Simcenter 솔루션, 이모터스의 e-드라이브 소음진동 테스트에 채택
- 두산디지털이노베이션, ‘AI 시대 HR 전략 수립 위한 포럼’ 개최
- 포티넷, ‘2023 지속가능성 보고서’ 발표
- 마이크로소프트, 국내 비즈니스 혁신 주도하는 AI 트랜스포메이션 사례 공개
- 버티브, 인공지능 기능의 차세대 마이크로 모듈형 데이터센터 출시
- 인섹시큐리티, 암호화폐 분석 디지털 포렌식 솔루션 'TRM 인텔리전스' 출시
- 쿤텍, 자율주행차의 새로운 패러다임 SDV를 위한 실시간 하이퍼바이저 공급
그래픽 / 영상
 결정론, 새로운 이더넷 애플리케이션을 열다
결정론, 새로운 이더넷 애플리케이션을 열다 AMD, 새로운 2세대 버설 적응형 SoC로 AI 기반 임베디드 시스템의 종단간 가속 지원
AMD, 새로운 2세대 버설 적응형 SoC로 AI 기반 임베디드 시스템의 종단간 가속 지원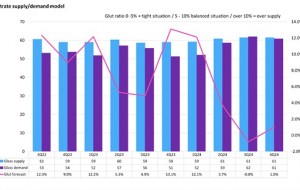 2024년, 디스플레이 글래스 산업 공급부족 우려
2024년, 디스플레이 글래스 산업 공급부족 우려
많이 본 뉴스
 원격 엣지 네트워크용 에이디링크 MXA-200 Arm 기반 5G IIoT 게이트웨이
원격 엣지 네트워크용 에이디링크 MXA-200 Arm 기반 5G IIoT 게이트웨이 노르딕, nRF 커넥트 SDK를 통해 구글의 ‘파인드 마이 디바이스’ 네트워크와 ‘미확인 트래커 경고’ 서비스 지원
노르딕, nRF 커넥트 SDK를 통해 구글의 ‘파인드 마이 디바이스’ 네트워크와 ‘미확인 트래커 경고’ 서비스 지원 엔비디아, 교육용 AI 슈퍼컴퓨터 개발 위해 조지아공과대학교와 협력
엔비디아, 교육용 AI 슈퍼컴퓨터 개발 위해 조지아공과대학교와 협력 리미니스트리트, 공공기관 엔터프라이즈 소프트웨어 유지보수 혁신 지원
리미니스트리트, 공공기관 엔터프라이즈 소프트웨어 유지보수 혁신 지원 마우저 일렉트로닉스, 창립 60주년 맞이해
마우저 일렉트로닉스, 창립 60주년 맞이해 지멘스, 글로벌 사이클 헬멧 제조사 ‘레이저스포츠’ 키네티코어 개발 지원
지멘스, 글로벌 사이클 헬멧 제조사 ‘레이저스포츠’ 키네티코어 개발 지원 웨스턴디지털, ‘세계에서 가장 윤리적인 기업’ 6년 연속 선정
웨스턴디지털, ‘세계에서 가장 윤리적인 기업’ 6년 연속 선정 AI PC 시대를 여는 ‘갤럭시 북4 시리즈’의 혁신 기술
AI PC 시대를 여는 ‘갤럭시 북4 시리즈’의 혁신 기술 ST, 산업 및 자동차 애플리케이션 지원하는 새로운 양방향 전류 감지 증폭기 출시
ST, 산업 및 자동차 애플리케이션 지원하는 새로운 양방향 전류 감지 증폭기 출시 마우저, 지능형 모터 제어 및 머신러닝 애플리케이션을 위한 NXP의 MCX 마이크로컨트롤러 공급
마우저, 지능형 모터 제어 및 머신러닝 애플리케이션을 위한 NXP의 MCX 마이크로컨트롤러 공급