
맥심 인터그레이티드 코리아(대표 한유아, www.maximintegrated.co.kr )가 산업용 로봇 EoAT(End-of-Arm Tooling) 개발을 간소화하는 트라이나믹의 오픈 소스 방식의 완전 통합형 레퍼런스 설계 ‘TMCM-1617-GRIP-REF’를 출시했다.
이 레퍼런스는 하드웨어 기반 벡터 제어(FOC, Field-Oriented Control)와 소프트웨어 설정 가능한 입출력, 3개의 통신 프로토콜 스택을 4,197mm2 크기의 컴팩트한 솔루션에 통합해 전자 로보틱 그리퍼의 크기를 3분의 1까지 축소한다. 또한 이 설계는 완전 통합형 하드웨어 플랫폼으로, 모터 제어 알고리즘은 물론 프로토콜 스택을 제공해 EoAT 개발 시간을 절반으로 단축한다.
맥심인터그레이티드의 ‘MAX22000’ 산업용 고정밀 설정 가능 입출력 및 ‘MAX14906’ 쿼드채널 디지털 입출력이 있어서 그리퍼 포지션 및 악력 등 트라이나믹 TMCM-1617 단일축 서보 드라이버의 여러 모드를 조절해 공장 생산성 향상을 위한 유연성도 증대한다.
EoAT 그리퍼에 사용하는 표준 폼팩터에 맞게 설계된 TMCM-1617-GRIP-REF 레퍼런스 설계는 산업용 이더캣, IO링크 또는 RS-485 통신을 지원하고, 소프트웨어 프로그래밍이 가능한 아날로그 및 디지털 입출력을 제공한다. 트라이나믹 모션 컨트롤 언어 통합 개발 환경(TMCL-IDE)을 활용한 구성도 가능하다. 레퍼런스 설계와 소프트웨어 플랫폼의 통합은 설계 엔지니어들이 완전한 EoAT 솔루션을 신속하게 구현할 수 있는 간편한 방법을 제공해준다.
제프 드앤젤리스(Jeffrey DeAngelis) 맥심 산업용 커뮤니케이션 사업부 부사장은 “산업용 자동화 엔지니어들은 로봇 EoAT 솔루션 개발 및 시운전을 간소화하는 툴킷을 필요로 한다”라며 “TMCM-1617-GRIP-REF 레퍼런스 설계는 툴링 개발 공정을 간소화해 자동화 엔지니어들이 에지에서 진정한 의미의 인텔리전스를 제공하는 최첨단의 실시간 EoAT 솔루션에 주력할 수 있도록 한다”라고 말했다.
조나스 프뤠거(Jonas Proeger) 트라이나믹 사업관리 디렉터는 “TMCM-1617-GRIP-REF 레퍼런스 설계는 모터 제어 알고리즘 구현은 물론, EoAT를 위한 프로토콜 스택 구현에 대한 부담을 해소해준다”라며 “최첨단 버스 옵션, 컨트롤 알고리즘 및 진단 기능을 단일 솔루션으로 공장의 생산성을 증대하고 에지에 인텔리전스를 부여한다”라고 말했다.
저작권©올포칩 미디어. 무단전재 및 재배포를 금지합니다.
 블로코, DTT 얼라이언스, ‘쟁글’ 공시정보 미러링 서비스 출시DTT-Xangle은 국내 최대 가상자산 공시정보 포털인 쟁글에 등록되는 모든 공시의 최초 원본 해시값을 DTT 얼라이언스의 컨소시엄 블록체인에 저장하여 그 데이터 정합성을 보장한다. DTT-Xangle은 분산 TSA 서비스 생태계 구축을 목표로 지난 11월 만들어진 DTT 얼라이언스의 첫 번째 실증 사례다
블로코, DTT 얼라이언스, ‘쟁글’ 공시정보 미러링 서비스 출시DTT-Xangle은 국내 최대 가상자산 공시정보 포털인 쟁글에 등록되는 모든 공시의 최초 원본 해시값을 DTT 얼라이언스의 컨소시엄 블록체인에 저장하여 그 데이터 정합성을 보장한다. DTT-Xangle은 분산 TSA 서비스 생태계 구축을 목표로 지난 11월 만들어진 DTT 얼라이언스의 첫 번째 실증 사례다 ADI, 지속적인 배터리 모니터링을 구현하는 BMS 제품군 확장자동차 제조사들은 자사의 EV 제품군을 효율적으로 확장하는 동시에, 전 세계적으로 점점 더 진화하는 안전 요구사항보다 한발 더 앞서 나가야 하는 과제에 직면해 있다. ADI의 최신 BMS 제품은 멀티 배터리 셀 구성을 지원하고 시동이 꺼진 상태에서도 배터리를 지속적으로 모니터링 할 수 있는 혁신적인 저전력 기능을 제공함으로써 어떠한 조건에서도 안전성을 보장함과 동시에 주행거리를 극대화한다.
ADI, 지속적인 배터리 모니터링을 구현하는 BMS 제품군 확장자동차 제조사들은 자사의 EV 제품군을 효율적으로 확장하는 동시에, 전 세계적으로 점점 더 진화하는 안전 요구사항보다 한발 더 앞서 나가야 하는 과제에 직면해 있다. ADI의 최신 BMS 제품은 멀티 배터리 셀 구성을 지원하고 시동이 꺼진 상태에서도 배터리를 지속적으로 모니터링 할 수 있는 혁신적인 저전력 기능을 제공함으로써 어떠한 조건에서도 안전성을 보장함과 동시에 주행거리를 극대화한다.- 아비바, 2021 회계연도 실적 발표…팬데믹 위기에도 혁신성 입증아비바는 코로나19로 인한 위기에 신속히 대응하기 위해 원격근무 환경으로 빠르게 전환하고 온라인으로 비즈니스 거래를 수행했다. 이렇게 더욱 진화된 운영 방식을 통해 비즈니스 및 고객과의 관계에서 아비바의 강점과 뛰어난 회복력을 입증했다. 또한, 아비바는 더욱 다양한 고객 기반을 확보하며 업계에서의 입지를 공고히 했다.
 '컴퓨텍스 2021 버추얼' 5월 31일 개막아태지역 최대 하이테크 전시회 컴퓨텍스(COMPUTEX)가 오는 5월 31일부터 6월 30일까지 새로운 모습을 갖추고 ‘컴퓨텍스 2021 버추얼(COMPUTEX 2021 Virtual)’로 돌아온다. 컴퓨텍스 주최측인 타이트라(TAITRA)는 한계를 뛰어넘는 혁신적인 플랫폼을 통해 기술 커뮤니티를 연결하는 온라인 전시회 ‘#컴퓨텍스 버추얼(#COMPUTEXVirtual)’도 개최한다.
'컴퓨텍스 2021 버추얼' 5월 31일 개막아태지역 최대 하이테크 전시회 컴퓨텍스(COMPUTEX)가 오는 5월 31일부터 6월 30일까지 새로운 모습을 갖추고 ‘컴퓨텍스 2021 버추얼(COMPUTEX 2021 Virtual)’로 돌아온다. 컴퓨텍스 주최측인 타이트라(TAITRA)는 한계를 뛰어넘는 혁신적인 플랫폼을 통해 기술 커뮤니티를 연결하는 온라인 전시회 ‘#컴퓨텍스 버추얼(#COMPUTEXVirtual)’도 개최한다. ‘DTT 얼라이언스’, 가상화폐 공시 서비스 ‘쟁글(Xangle)’ 공시정보 미러링 서비스 ‘DTT-Xangle’ 출시DTT-Xangle은 국내 최대 가상자산 공시정보 포털인 쟁글에 등록되는 모든 공시의 최초 원본 해시값을 DTT 얼라이언스의 컨소시엄 블록체인에 저장하여 그 데이터 정합성을 보장한다. DTT-Xangle은 분산 TSA 서비스 생태계 구축을 목표로 지난 11월 만들어진 DTT 얼라이언스의 첫 번째 실증 사례다.
‘DTT 얼라이언스’, 가상화폐 공시 서비스 ‘쟁글(Xangle)’ 공시정보 미러링 서비스 ‘DTT-Xangle’ 출시DTT-Xangle은 국내 최대 가상자산 공시정보 포털인 쟁글에 등록되는 모든 공시의 최초 원본 해시값을 DTT 얼라이언스의 컨소시엄 블록체인에 저장하여 그 데이터 정합성을 보장한다. DTT-Xangle은 분산 TSA 서비스 생태계 구축을 목표로 지난 11월 만들어진 DTT 얼라이언스의 첫 번째 실증 사례다.- 포티넷, 자동화, 통합 및 전문 서비스에 중점 두고 FortiEDR 기능 확장FortiEDR은 지속적인 행위-기반(behavior-based) 보호는 물론, 지속적인 분석 및 자동 대응조치를 제공하여 재이미징(re-image)을 위해 시스템을 오프라인으로 전환하지 않고도 악의적으로 변경된 데이터를 원래 데이터로 롤백(roll back)할 수 있다. 또한, FortiEDR은 사고 대응 플레이북을 제공하여 기업들이 엔드포인트 그룹, 자산 가치 및 위협의 종류를 기반으로 일반적인 대응 조치를 손쉽게 사전 정의할 수 있도록 지원한다.
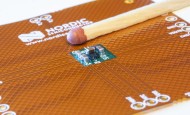 노르딕, nRF52/nRF53 시리즈 SoC를 위한 초저 IQ를 지원하는 초소형 전력관리 IC 출시이 PMIC는 노르딕의 nRF52 및 nRF53 시리즈 멀티 프로토콜 SoC(System-on-Chip)에 대한 안정적인 전원 공급과 동작을 보장하고, 애플리케이션 배터리 수명을 극대화할 수 있다. 또한 이 제품은 충전식 리튬이온 또는 리튬폴리머 배터리를 사용하는 모든 애플리케이션에서 범용 PMIC로도 사용할 수 있다. 매우 컴팩트한 폼팩터로 구현된 이 PMIC는 첨단 웨어러블 기기와 커넥티드 의료기기를 비롯해 공간 제한적인 다른 모든 애플리케이션에 매우 적합하다.
노르딕, nRF52/nRF53 시리즈 SoC를 위한 초저 IQ를 지원하는 초소형 전력관리 IC 출시이 PMIC는 노르딕의 nRF52 및 nRF53 시리즈 멀티 프로토콜 SoC(System-on-Chip)에 대한 안정적인 전원 공급과 동작을 보장하고, 애플리케이션 배터리 수명을 극대화할 수 있다. 또한 이 제품은 충전식 리튬이온 또는 리튬폴리머 배터리를 사용하는 모든 애플리케이션에서 범용 PMIC로도 사용할 수 있다. 매우 컴팩트한 폼팩터로 구현된 이 PMIC는 첨단 웨어러블 기기와 커넥티드 의료기기를 비롯해 공간 제한적인 다른 모든 애플리케이션에 매우 적합하다. 넥스페리아의 Low RDS(on) 40 VMOSFET, 자동차 및 산업용 애플리케이션에 최고의 전력 밀도를 제공해AEC-Q101 규격을 준수하는 BUK7S0R5-40H 제품은 제동, 조향(파워 스티어링), 역전압 배터리 보호, e-퓨즈, DC-DC 컨버터 및 모터 제어 애플리케이션 등 자동차 표준에서 요구하는 성능을 두 배 이상 제공한다. 산업용 PSMNR55-40SSH MOSFET은 전동 공구, 가전 제품, 팬, 전기 자전거, 스쿠터 및 휠체어의 배터리 절연, 전류 제한, 전자 퓨즈, 모터 컨트롤, 동기 정류 및 부하 스위치 애플리케이션에 적합하다.
넥스페리아의 Low RDS(on) 40 VMOSFET, 자동차 및 산업용 애플리케이션에 최고의 전력 밀도를 제공해AEC-Q101 규격을 준수하는 BUK7S0R5-40H 제품은 제동, 조향(파워 스티어링), 역전압 배터리 보호, e-퓨즈, DC-DC 컨버터 및 모터 제어 애플리케이션 등 자동차 표준에서 요구하는 성능을 두 배 이상 제공한다. 산업용 PSMNR55-40SSH MOSFET은 전동 공구, 가전 제품, 팬, 전기 자전거, 스쿠터 및 휠체어의 배터리 절연, 전류 제한, 전자 퓨즈, 모터 컨트롤, 동기 정류 및 부하 스위치 애플리케이션에 적합하다. AMD, 메르세데스-AMG 페트로나스 e스포츠 팀에 뛰어난 게이밍 환경 위한 첨단 기술 지원AMD는 메르세데스-AMG 페트로나스 e스포츠 팀에게 혁신적인 AMD RDNA 2 게임 아키텍처 기반의 AMD 라데온 RX 6900 XT(AMD Radeon RX 6900 XT) 그래픽 카드와 선도적인 “젠 3(Zen 3)” 코어 아키텍처 기반의 AMD 라이젠 7 5800X(AMD Ryzen 5800X) 데스크톱 프로세서, 고주사율 및 초저지연성 게임 플레이를 지원하는 라데온 소프트웨어(Radeon Software) 등을 제공한다.
AMD, 메르세데스-AMG 페트로나스 e스포츠 팀에 뛰어난 게이밍 환경 위한 첨단 기술 지원AMD는 메르세데스-AMG 페트로나스 e스포츠 팀에게 혁신적인 AMD RDNA 2 게임 아키텍처 기반의 AMD 라데온 RX 6900 XT(AMD Radeon RX 6900 XT) 그래픽 카드와 선도적인 “젠 3(Zen 3)” 코어 아키텍처 기반의 AMD 라이젠 7 5800X(AMD Ryzen 5800X) 데스크톱 프로세서, 고주사율 및 초저지연성 게임 플레이를 지원하는 라데온 소프트웨어(Radeon Software) 등을 제공한다. 델 테크놀로지스, 임직원 참여 자선 경매 행사로 사회 공헌 이어가사내 여성 임직원 위원회인 ‘WIA(Women-In-Action)’가 주관하고 사내 ‘CSR 앰버서더’ 팀이 함께 준비한 이번 이벤트는 줌(Zoom)과 마이크로소프트 팀즈(Microsoft Teams) 등 온라인 협업 툴을 통해 150여명의 임직원들이 동시에 접속해 기부자와 구매자들이 직접 소통하며 진행됐다. 이번 행사는 임직원들이 자발적으로 기증한 물품으로 온라인 경매를 실시하여 낙찰 수익금은 ‘굿네이버스’에 전달하고, 기증 물품 일부는 ‘아름다운가게’에 기부하는 방식으로 이뤄졌다. 굿네이버스에 전달된 수익금은 국내 아동권리 보호 사업에 쓰일 예정이다.
델 테크놀로지스, 임직원 참여 자선 경매 행사로 사회 공헌 이어가사내 여성 임직원 위원회인 ‘WIA(Women-In-Action)’가 주관하고 사내 ‘CSR 앰버서더’ 팀이 함께 준비한 이번 이벤트는 줌(Zoom)과 마이크로소프트 팀즈(Microsoft Teams) 등 온라인 협업 툴을 통해 150여명의 임직원들이 동시에 접속해 기부자와 구매자들이 직접 소통하며 진행됐다. 이번 행사는 임직원들이 자발적으로 기증한 물품으로 온라인 경매를 실시하여 낙찰 수익금은 ‘굿네이버스’에 전달하고, 기증 물품 일부는 ‘아름다운가게’에 기부하는 방식으로 이뤄졌다. 굿네이버스에 전달된 수익금은 국내 아동권리 보호 사업에 쓰일 예정이다. 마이크로소프트, ‘빌드’에서 개발자 지원 혁신 기술 대거 공개마이크로소프트는 Visual Studio, GitHub, .NET 등 업계 가장 풍부한 개발자 도구를 갖췄다. 또 마이크로소프트 클라우드 플랫폼은 다양한 기능은 물론 통합 보안과 아이덴티티 및 접근 관리 솔루션까지 포괄적으로 제공하면서 개발자의 빠르고 안전한 애플리케이션 구축을 지원하고 있다. 마이크로소프트는 빌드에서 공개한 기술을 기반으로 전 세계 개발자들의 개발 속도 향상에 힘을 실을 계획이다.
마이크로소프트, ‘빌드’에서 개발자 지원 혁신 기술 대거 공개마이크로소프트는 Visual Studio, GitHub, .NET 등 업계 가장 풍부한 개발자 도구를 갖췄다. 또 마이크로소프트 클라우드 플랫폼은 다양한 기능은 물론 통합 보안과 아이덴티티 및 접근 관리 솔루션까지 포괄적으로 제공하면서 개발자의 빠르고 안전한 애플리케이션 구축을 지원하고 있다. 마이크로소프트는 빌드에서 공개한 기술을 기반으로 전 세계 개발자들의 개발 속도 향상에 힘을 실을 계획이다.- IAR, 인피니언 Traveo II MCU에 적용 가능한 완전한 개발 툴 세트 제공IAR 시스템즈와 인피니언은 이러한 파트너십을 통해 인피니언의 FM MCU와 PSoC 제품군을 비롯해 두 세대의 Traveo MCU 기기까지 매우 다양한 종류의 Arm 기반 MCU에 적용할 수 있는 확장형 개발을 구현하고자 한다. 차체 전자 장치용 32비트 Traveo II MCU는 강력한 성능과 우수한 안전성 및 보안 기능들을 제공한다.
 엘리먼트14, Rohde & Schwarz의 신제품 NGA100 전원공급장치 시리즈 입고신세대 NGA100 시리즈는 엔트리 레벨 전원공급장치 제품군으로, 기능이 풍부하며 합리적인 가격의 범용 제품을 위해 세심하게 설계되었으며 사용이 간편합니다. 안정적인 출력, 저소음, 선형 토폴로지를 기반으로 좁은 공간에 설치되며, 조용하게 작동합니다. NGA100 시리즈는 리드백 정확도가 뛰어나며, 사물 인터넷(IoT) 기기에 필요한 까다로운 측정 실행을 위한 다중 절전 모드를 갖추어 전류 범위가 낮습니다
엘리먼트14, Rohde & Schwarz의 신제품 NGA100 전원공급장치 시리즈 입고신세대 NGA100 시리즈는 엔트리 레벨 전원공급장치 제품군으로, 기능이 풍부하며 합리적인 가격의 범용 제품을 위해 세심하게 설계되었으며 사용이 간편합니다. 안정적인 출력, 저소음, 선형 토폴로지를 기반으로 좁은 공간에 설치되며, 조용하게 작동합니다. NGA100 시리즈는 리드백 정확도가 뛰어나며, 사물 인터넷(IoT) 기기에 필요한 까다로운 측정 실행을 위한 다중 절전 모드를 갖추어 전류 범위가 낮습니다 클라우데라, 클라우드 하이브리드 시대의 해법 제시이번 ‘클라우데라 나우’에서는 클라우데라 데이터 플랫폼(CDP)의 로드맵을 비롯해 효율적인 전사적 데이터 강화 파이프라인 자동화를 위한 Cloudera Data Engineering, 아파치 NiFi와 Kafka를 사용해 데이터 스트리밍을 수집하는 Data in Motion 등을 데모와 함께 전문가의 노하우가 공개됐다.
클라우데라, 클라우드 하이브리드 시대의 해법 제시이번 ‘클라우데라 나우’에서는 클라우데라 데이터 플랫폼(CDP)의 로드맵을 비롯해 효율적인 전사적 데이터 강화 파이프라인 자동화를 위한 Cloudera Data Engineering, 아파치 NiFi와 Kafka를 사용해 데이터 스트리밍을 수집하는 Data in Motion 등을 데모와 함께 전문가의 노하우가 공개됐다.
 ams OSRAM과 도미넌트 옵토 테크놀로지스, 지능형 RGB LED로 스마트 자동차 실내 조명 구현
ams OSRAM과 도미넌트 옵토 테크놀로지스, 지능형 RGB LED로 스마트 자동차 실내 조명 구현 원프레딕트, 산업 AI 설비관리 솔루션으로 국제전기전력전시회 참가
원프레딕트, 산업 AI 설비관리 솔루션으로 국제전기전력전시회 참가 에이디링크, 인텔 Amston-Lake 기반 모듈 출시
에이디링크, 인텔 Amston-Lake 기반 모듈 출시 자이스 코리아, 제약바이오 연구 혁신을 지원하는 최신 고품질 이미징 기술 공개
자이스 코리아, 제약바이오 연구 혁신을 지원하는 최신 고품질 이미징 기술 공개 KT, K-UAM 실증서 세계 최초 UAM 통합운용체계 검증
KT, K-UAM 실증서 세계 최초 UAM 통합운용체계 검증
- 마우저, 산업 및 웨어러블 기기를 위해 BLE 5.2 지원하는 아나로그디바이스의 마이크로컨트롤러 공급
- 제조업 98% 혁신과 시장 출시의 가장 큰 어려움으로 데이터 문제 지적
- 큐브리드, 오픈소스 DB관리 도구 디비버(DBeaver) 연동 강화
- 인섹시큐리티, 다수 모바일 기기 데이터 동시 추출 솔루션 ‘마그넷 그레이키 패스트트랙' 출시
- 델 테크놀로지스, 제조 엣지 환경 지원하는 포트폴리오 및 에코시스템 강화
- 페펄앤드푹스, 최대 60m의 측정 거리를 제공하는 소형 거리 센서 출시
그래픽 / 영상
 인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기
인터넷의 ‘필터 버블(Filter Bubble)’ 깨부수기 결정론, 새로운 이더넷 애플리케이션을 열다
결정론, 새로운 이더넷 애플리케이션을 열다 AMD, 새로운 2세대 버설 적응형 SoC로 AI 기반 임베디드 시스템의 종단간 가속 지원
AMD, 새로운 2세대 버설 적응형 SoC로 AI 기반 임베디드 시스템의 종단간 가속 지원
많이 본 뉴스
 인텔-美 정부, 반도체 지원법에 따라 85억 달러 직접 지원 발표
인텔-美 정부, 반도체 지원법에 따라 85억 달러 직접 지원 발표 ST의 RS-485 트랜시버, 산업 자동화, 스마트 빌딩, 로보틱스의 최첨단 애플리케이션 지원
ST의 RS-485 트랜시버, 산업 자동화, 스마트 빌딩, 로보틱스의 최첨단 애플리케이션 지원 델 테크놀로지스, 신규 보안 모듈 탑재한 ‘인스피론’ 노트북 신제품 공개
델 테크놀로지스, 신규 보안 모듈 탑재한 ‘인스피론’ 노트북 신제품 공개 인텔 파운드리, 고개구율 극자외선(High-NA EUV) 도입으로 칩 제조 분야 선도
인텔 파운드리, 고개구율 극자외선(High-NA EUV) 도입으로 칩 제조 분야 선도 레노버, AI PC 혁신의 미래 제시
레노버, AI PC 혁신의 미래 제시 유블럭스, 위치 정확도를 향상시키는 새로운 GNSS 플랫폼 출시
유블럭스, 위치 정확도를 향상시키는 새로운 GNSS 플랫폼 출시 키사이트, 광대역폭 오실로스코프 프로브 출시
키사이트, 광대역폭 오실로스코프 프로브 출시 Arm, AI 지원 차량 위한 새로운 오토모티브 기술 발표
Arm, AI 지원 차량 위한 새로운 오토모티브 기술 발표 키사이트, 스카일로 비지상 네트워크 인증 프로그램 주도
키사이트, 스카일로 비지상 네트워크 인증 프로그램 주도 원프레딕트, 산업AI K-예지보전 솔루션으로 글로벌 시장 ‘정조준’
원프레딕트, 산업AI K-예지보전 솔루션으로 글로벌 시장 ‘정조준’